The second generation of a user-friendly tool for EtherCAT network engineering, installation, and diagnostics.
- Lightweight, high-performance solution for EtherCAT Masters offers essential functions for creating and managing Master configurations and network monitoring.
- Integrates with other design environments to create a unified, enhanced development workspace using Studio Development Framework.
- Features are competitive with leading industry products.
Configuration
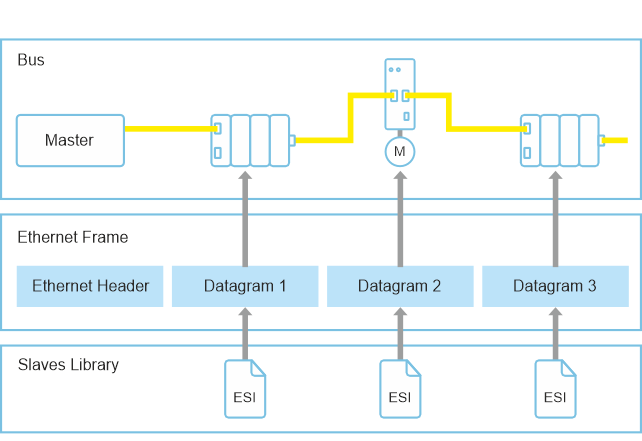
Automatic frame creation
KPA EtherCAT Studio offers significant advantages by automatically configuring Ethernet frames for the bus using a comprehensive Slaves Library. Additionally, the built-in bus scanning capability ensures that all connected devices are recognized and optimized for seamless communication. This feature simplifies the setup process, saving time and reducing the potential for errors.
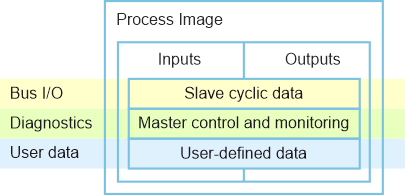
Process Image variables
The Process Image (PI) Variables configuration feature allows users to manage and control Master and slave variables, including PDO entries. This functionality supports the management of both predefined PI variables, which can be used for efficient configuration and management, and user-defined variables, which can be created and managed to meet specific system requirements and adapt to unique use cases.
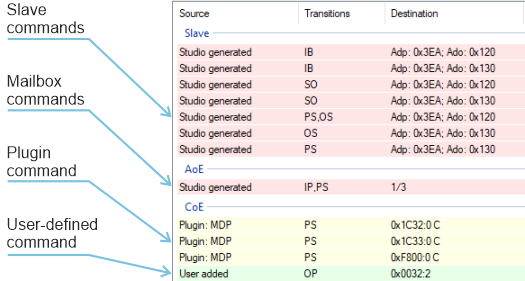
Initialization commands
Initialization commands are responsible for initializing and controlling processes of communication with a Slave, as specified. During automatic generation, these commands perform several crucial checks, including state control, device identification, DC configuration, and EtherCAT services initialization.
Furthermore, Init commands also support Mailbox commands, which provide functionalities such as PDO mapping, Application-oriented EtherCAT (AoE), Ethernet over EtherCAT (EoE), plugin commands with device parametrization, and User-defined commands.
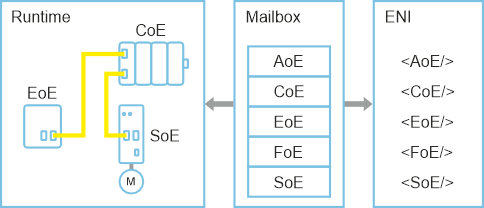
Full control of Mailbox services
KPA EtherCAT Studio provides full control of Mailbox services, enabling access to a range of features. These include Application over EtherCAT (AoE), Controller over EtherCAT (CoE), Ethernet over EtherCAT (EoE), File over EtherCAT (FoE), and Sercos over EtherCAT (SoE).
Additionally, it allows for access to the Object Dictionary, facilitate data and file transfer, and enable protocols configuration.
Device Identification
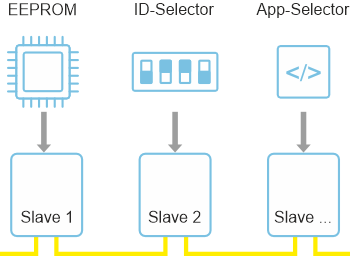
The Device Identification feature provides a unique identifier for each slave, allowing for precise and reliable addressing. This feature ensures that each device is accurately recognized and communicated with, enabling efficient and error-free data exchange.
EtherCAT technology allows slave addressing in different ways depending on device’s possibility and user’s needs.
- Configured station alias set by Configuration Tool
- EEPROM alias – an alias is read from slave’s EEPROM (0x8 address)
- Requesting ID – AL Status Code register 0x0134 is used for the Device ID value
- Direct ID – ID-Selector is connected directly to I/O Inputs of the ESC. There is no need for microcontroller

Cyclic Tasks/Units
The Cyclic Tasks/Units feature offers a flexible way to manage process data updates. It enables the division of cyclic updates into multiple tasks, each with its own independent rate, priority, and offset.
Additionally, this feature allows for the binding of slave input/output data to specific cyclic frames, ensuring that particular blocks of the process image are updated at precise intervals. This results in efficient and synchronized data exchange, giving you fine-grained control over your process data updates.
Power data analyzing
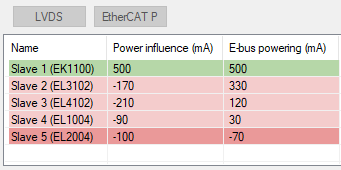
The system of power tracing allows to monitor the power supply and consumption of LVDS slaves on the bus to avoid power lack issues in the configuration.
- Parse power requirements
- Power monitoring and calculation
Distributed Clock
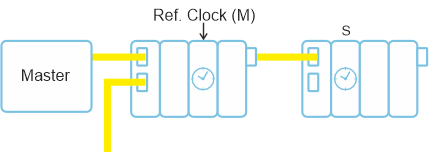
The feature enables synchronization of the Master and all Slave devices on the bus.
It is configured on the both sides Master and Slaves:
- DC time
- Shift time
- Reference clock
- DC mode
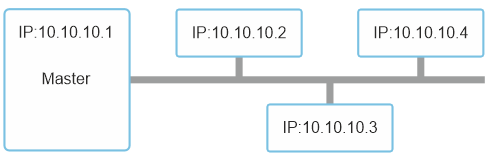
Configuring EoE subnet
- Assign IP/DNS/Mask
- Switch/IP port
- Manual/automatically configuring
Plugins
KPA EtherCAT Studio offers a flexible and adaptable solution for supporting slaves with specific specifications and extending their capabilities.
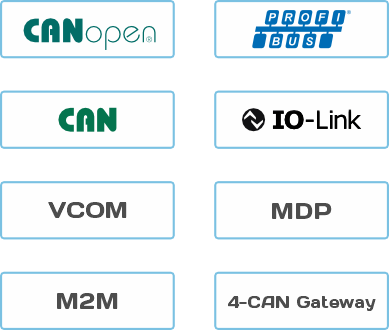
We provide a range of ready-to-use plugins for popular devices, including:
- EL6731-0010: Profibus slave support
- EL6731: Profibus Master support
- EL6751: CAN and CANopen support
- EL600x/EL602x/EP6002/EP6002-0002: Virtual Serial COM support
- KPA EtherCAT 4CAN Gateway: 4-CAN Gateway support
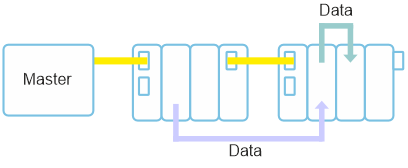
- EL6692/EL6695: Master-to-Master support
- EL622x/EP622x/EJ622x: Support for IO-Link devices
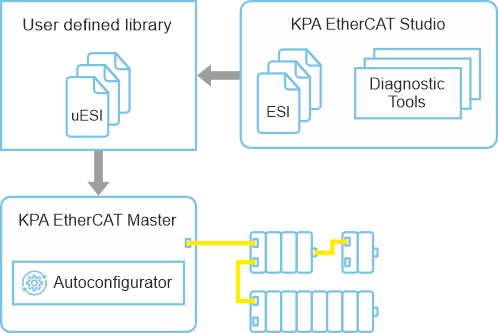
Autoconfigurator User Interface
Typically, EtherCAT operates with a static bus configuration defined by ENI files. However, this can be restrictive in situations where the final equipment is unknown during development. Some systems require the flexibility to modify devices or their settings dynamically, without relying on external tools. For example, machines with interchangeable tools may need this capability. To address this, koenig-pa offers the Autoconfigurator UI, which allows the creation of individual device configurations. These configurations can then be dynamically combined on the Master Autoconfigurator to form a complete bus configuration.
KPA EtherCAT Studio provides a comprehensive user interface to support the development and testing of configuration files for Master Autoconfigurator, ensuring smooth integration into production environments.
Control
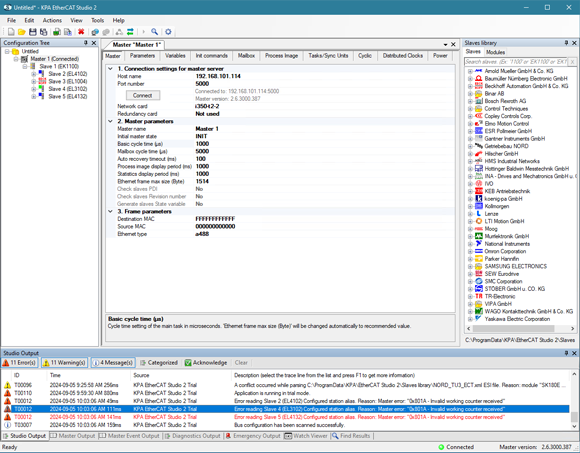
EtherCAT Master network configuration
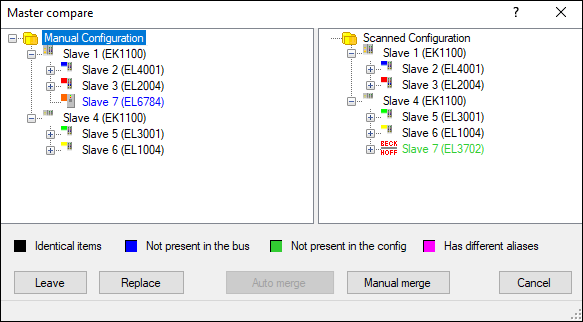
A powerful interface for connecting to a remote Master and uploading configurations (ENI).
This feature not only facilitates seamless communication but also includes bus verification during the connection process. It automatically detects errors and configuration mismatches, and can resolve them.
Access to slave memory and EEPROM
A comprehensive interface to access and manage slave memory registers and EEPROM. The KPA EtherCAT Studio provides decryption capabilities and a built-in editor for specific areas of slave memory and EEPROM.
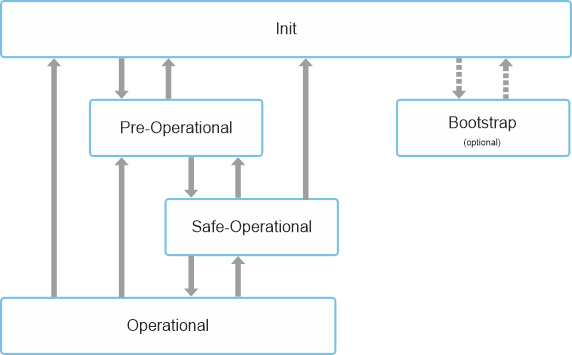
State machine
A monitoring and control feature, enabling users to oversee and manage the state of the entire EtherCAT bus (Master state) or individual slaves. This feature also provides real-time access to AL/DL status messages.
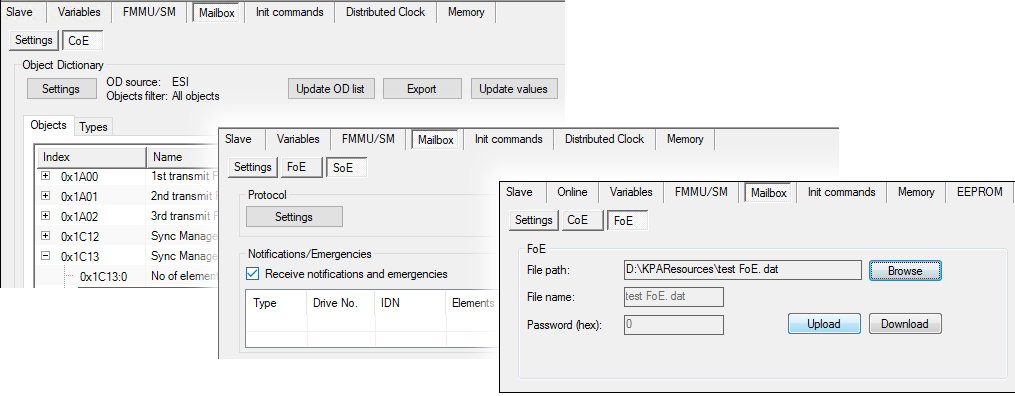
Mailbox protocols
KPA EtherCAT Studio offers a range of features for accessing Mailbox data, including:
- CoE (CANopen over EtherCAT): Access to the object dictionary, enabling users to read and set CoE OD values.
- SoE (Safety over EtherCAT): Access to SERCOS IDNs, allowing users to read and write data.
- FoE (File Access over EtherCAT): Read and write files using an implemented interface.
Diagnostics
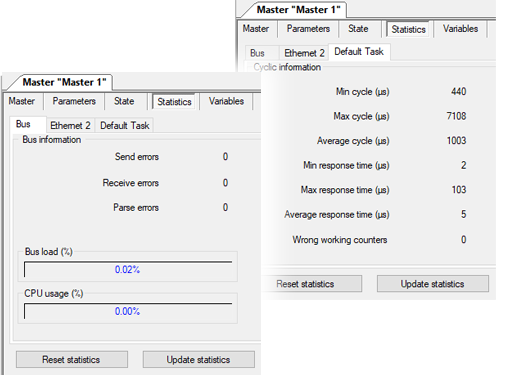
Statistics
The Statistics feature of the Studio is designed to provide a comprehensive overview of user system’s performance through a list of various statistical parameters.
- Network activity acquired from the NIC: how many frames were sent, how many errors were fixed, how many packages were sent and received, etc.
- EtherCAT activity acquired from the Master: how many frames the Master sent and how many frames did not pass
- CPU and bus loads
- The divergence of the set periodicity values of the device with the real one
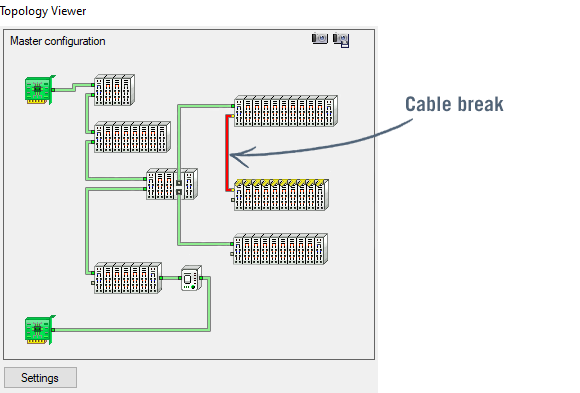
Topology viewer
An essential tool for visualizing the structure and status of EtherCAT network! This intuitive interface allows to easily monitor network’s health.
In the event of a communication loss between segments, the affected wire will be clearly highlighted in red, ensuring immediate visibility of any issues. Additionally, if a cable breakdown occurs while redundancy check is enabled, the system will pinpoint the exact location of the failure, enabling swift troubleshooting and maintenance.
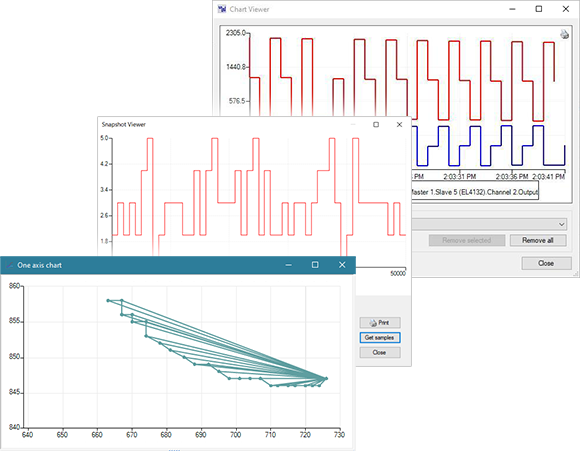
Chart Viewer / Snapshot Viewer / Runtime Data Logger
Studio offers advanced diagnostic tools for simultaneous monitoring of one or multiple signals from various slaves. Users can visualize their selected signals in real-time while in online mode, allowing for enhanced analysis and insight into system performance.
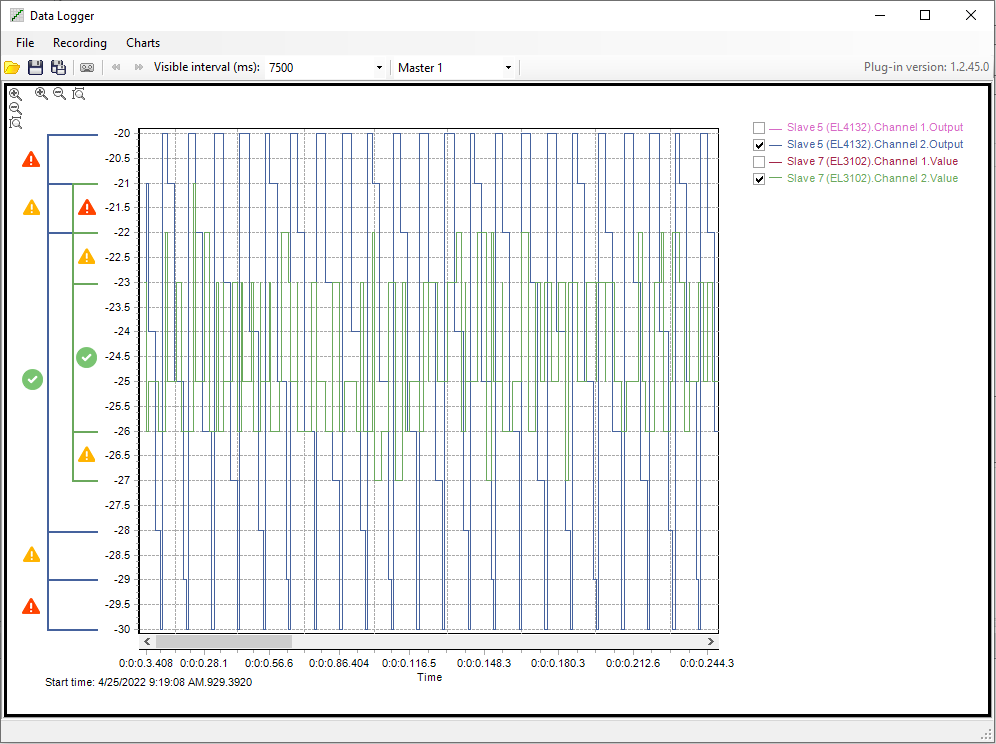
Data Logger
The Data Logger tool enables the capture of a snapshot of the EtherCAT network and the collection of information regarding the system’s state. The gathered data can be analyzed directly within the Data Logger and easily exported for use with other tools, such as Wireshark.
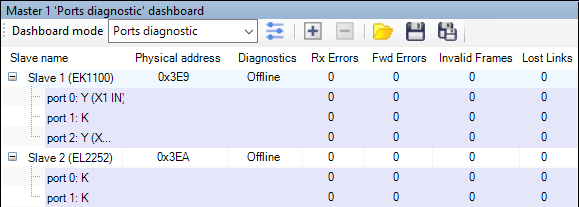
Dashboard
The Dashboard is a key diagnostic feature of KPA EtherCAT Studio, designed to group and monitor diagnostic data for easy access and analysis. It offers two modes: the General mode, which highlights slave properties, and the Ports Diagnostic mode, which focuses on port parameters.
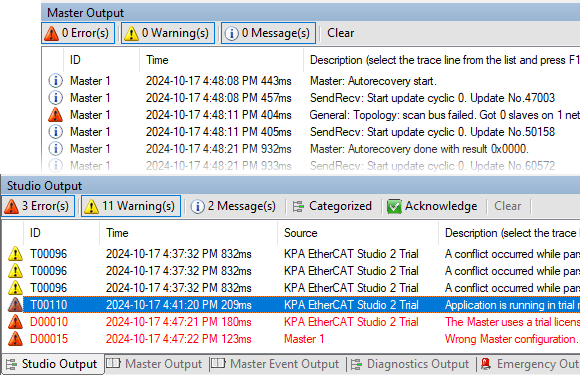
Studio/Master Traces, Master Events
Studio offers a comprehensive logging toolset, enabling users to capture logs of both Studio and Master operations. The logs can be filtered and exported in TXT format for further analysis and troubleshooting.
