- Project file handling and comparing
- Topology creation via bus scan, read from file or drag-and-drop
- Comparison between configured and real networks
- Process Image with scaling
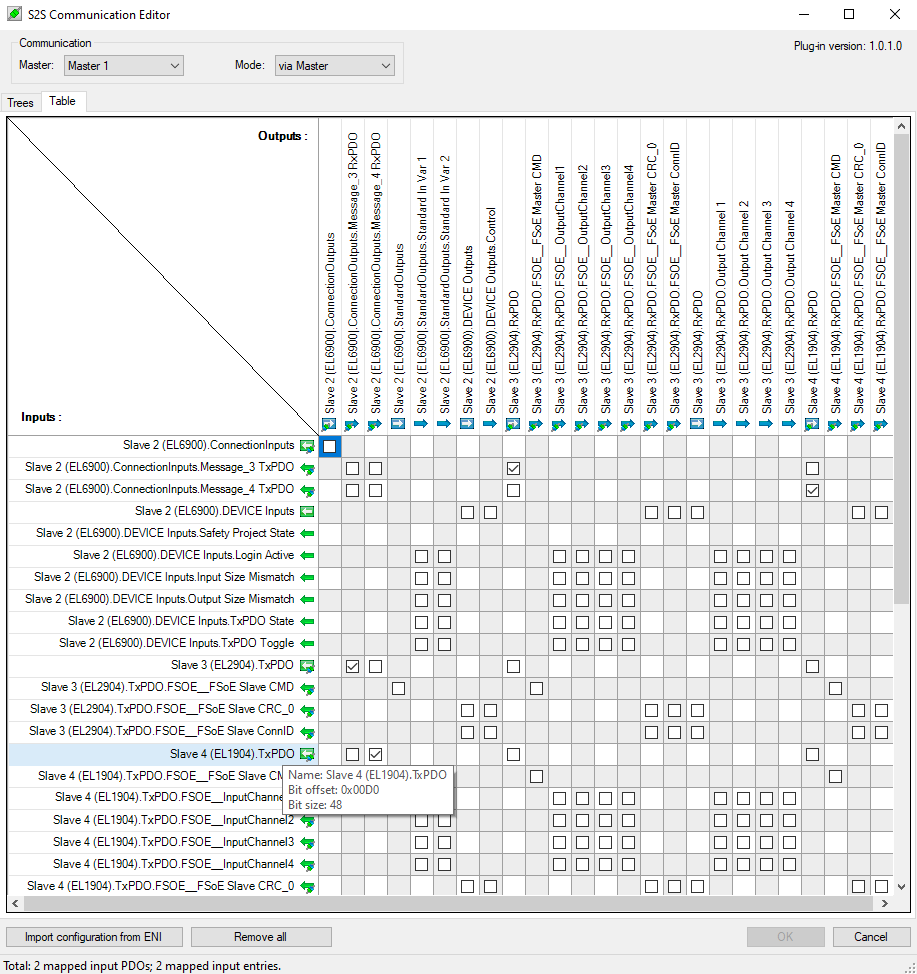
- S2S Editor
- Handling for FSoE Master and Slaves
- Various Sample Rates
- Distributed Clocks (DC) settings
- Import signal names from CoDeSys
- Export network configuration files
-
- ETG.2100 with extensions of koenig-pa GmbH, ETG.2100
- IEC 61131-3 Standard, Export of “C” header files
EtherCAT master network configuration
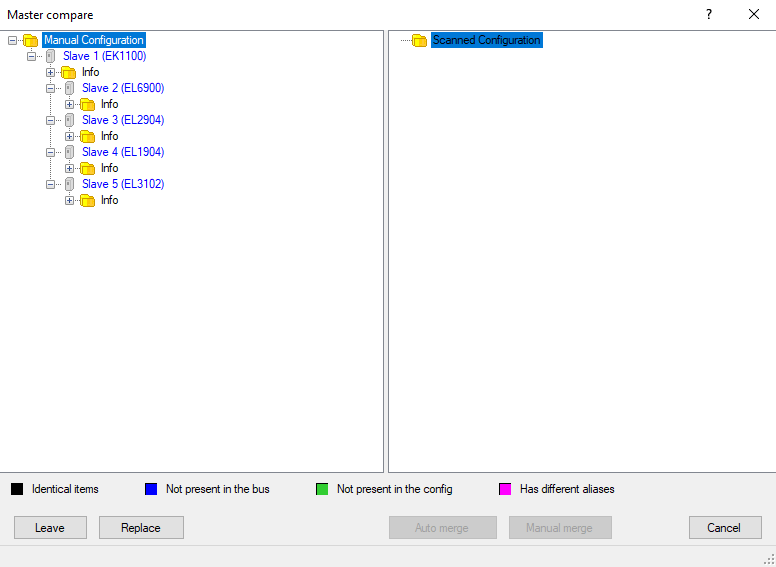
Upon attaching to Master, the Studio acquires Master configuration (if the Master is running) or scans the network to detect the real hardware configuration, and then compares a Master side configuration against the one available in the Studio. If configurations do not match, there are several possibilities to manipulate the differences, such as simple replacement of master or studio side configuration with its counterpart or advanced interactive merge of configurations.
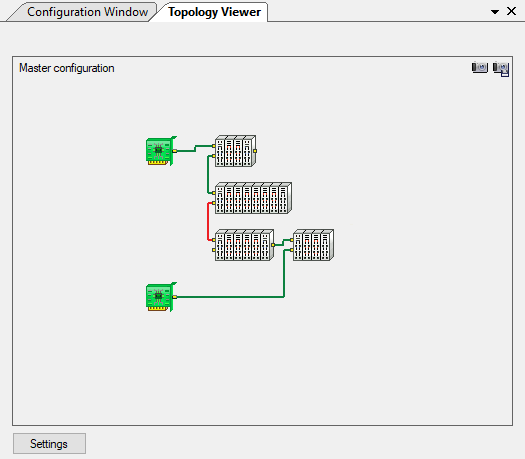
EtherCAT Topology
Topology window displays structure and state of EtherCAT network. When there is a loss of communication between segments, you will see the wire highlighted with red color. If a cable breakdown occurs with redundancy check enabled, the system will indicate the place of breakdown.
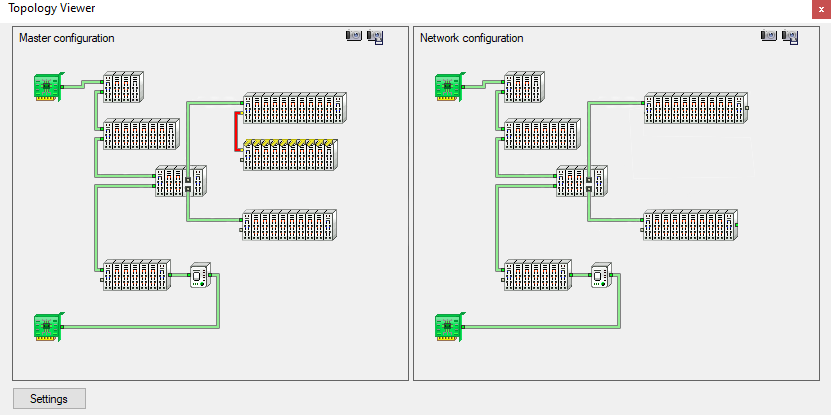
EtherCAT Cable Redundancy
Nowadays redundancy has become a must in most applications due to increased requirements to sustainability and reliability of the systems employed in process automation. Cable redundancy makes possible several things that used to be bottle-necks of conventional field bus systems built up on closed ring principles, such as cable feedback for problem finding and system availability in case of cable break. If a line break occurs in the network, it is detected and the topology will display the event (red wire). Due to redundancy in wiring and network cards all slaves remain connected to EtherCAT Master.
Process Image viewer
Process Image viewer shows allocation of inputs/outputs in memory.

Slave-to-Slave communication
Slave-to-Slave (S2S) communication allows logical communication of slaves in input-output matrix of the Process Image without direct physical wiring.
By means of Slave-to-Slave communication is performed the management of safety system. Safety uses so called black channel approach, where FailSafety over EtherCAT (FSoE) is sitting on top of EtherCAT slave stack in slave device. Here safety and usual process are mixed in one media. EtherCAT Master has to route safety message(s) from safety slaves to safety masters using Slave-to-Slave communication. In case of safety situation, the Slave-to-Slave is unable to send data and in connections, crc and status will be zeros instead of valid data. In this case safety logic starts according to defined behavior.

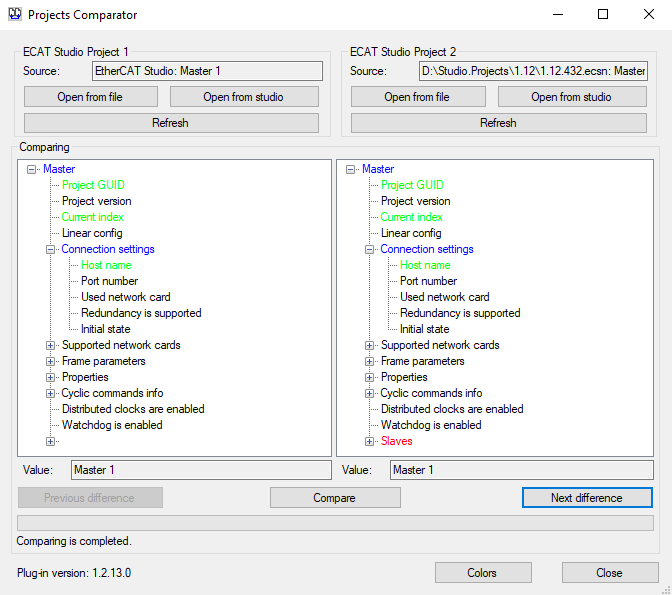
EhterCAT Projects Comparing Tool
ECAT Projects Comparing Tool allows comparison of a project available in the Studio against another project from a file.
Differences are highlighted with customizable colors, property values are available.