With the KPA Motion Control Library, we offer a comprehensive set of libraries and tools for precision motion control automation. Our KPA Motion Control software conforms to the PLCopen specification, providing a vendor-neutral motion control interface that can be implemented across various systems.
Key applications of the KPA Motion Control Library include:
- Automating production lines and manufacturing processes
- Creating position, speed, and torque control systems
- Developing motion control functionality for computer numerical control (CNC) machines like lathes, mills, plasma/laser/waterjet cutters, and more
- Integrating motion control into specialized equipment such as injection molding machines (IMM), wire benders, packaging lines, printers, and other industrial machine
Key features
- 3D-axis, synchronized axis, and single-axis motion control for executing complex trajectories
- Online generation of time-optimal trajectories for increased efficiency
- Jerk-limited motion profiles to reduce mechanical wear, vibration, and load impacts
- Bus Abstraction Layer (BUSAL) for integration with diverse hardware
- Multi-core CPU support for Intel and ARM architectures
- Easy integration with the EtherCAT network with our comprehensive in-house KPA EtherCAT Master Stack
- Stepper motors control through step/dir interface
- Complies with PLCopen standards as a voting member of the PLCopen Group
- Extended capabilities due to two operating modes –
Cyclic Synchronous Torque (CST) mode for centralized control
Cyclic Synchronous Position (CSP) mode for decentralized control - Motion blending for smooth transitions without intermediate stops
- Numerous PLCopen function blocks implemented (Parts 1, 4), covering single-axis control and coordinated multi-axis control
- Advanced transition modes between motion segments
- Effortless software-based gearing for linking slave axes to master axes,
- Cam profile implementation for facilitated slave axis control
- G-code interpretation support for facilitated CNC machines programming
- DXF file import for creating motion programs directly from the CAD-family software
- Continuous trajectory update feature for real-time adjustments
- Software-based axis limits configuration for enhanced safety
- Virtual axis support for development and testing with no physical hardware
- Belt axes with modulo positioning
- Real-time position lag monitoring
Workflow
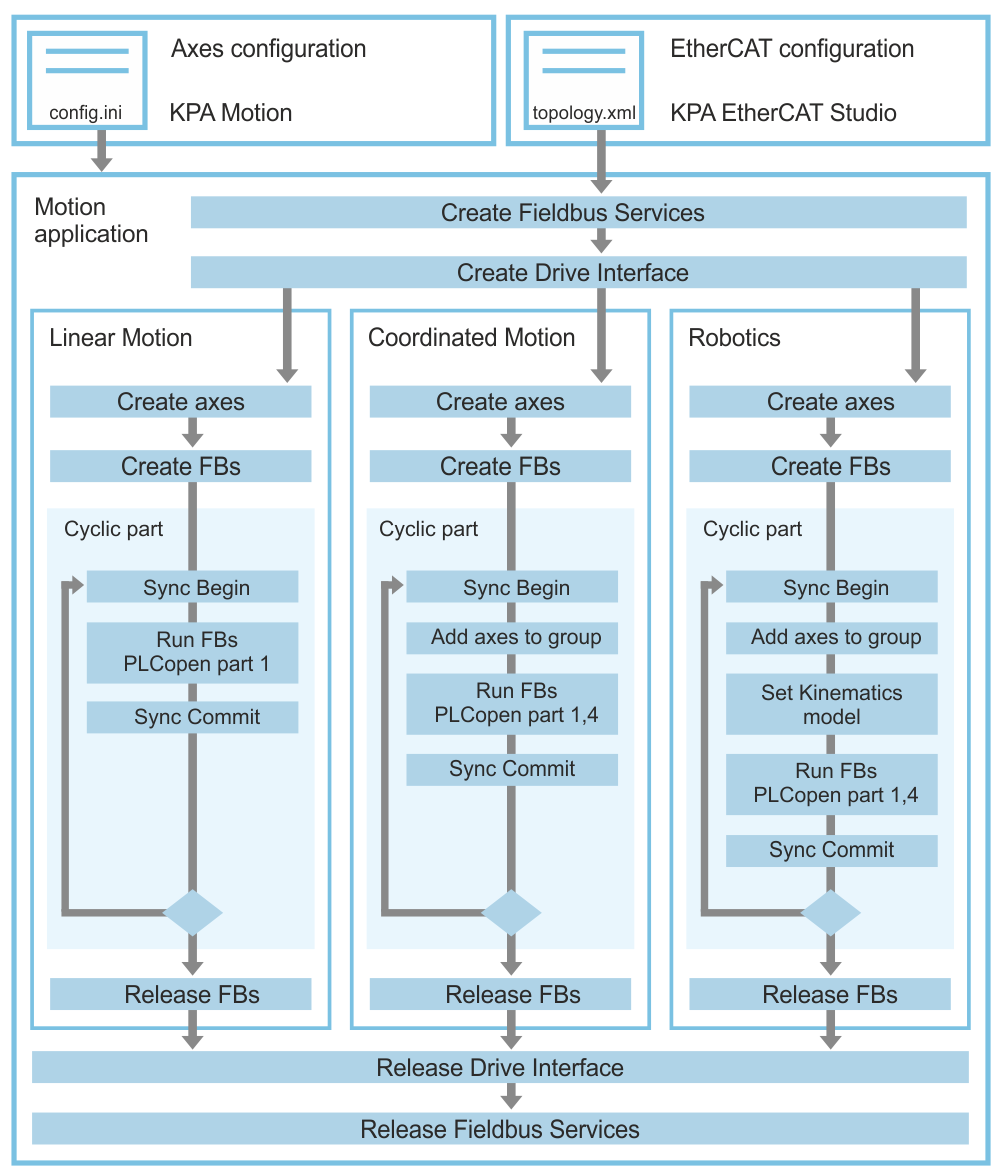
KPA Motion Control is delivered as an archive, which includes documentation, header files, libraries and examples.
Benefits
- Hardware independent architecture
- Сomplex motion profiles
- Simple Integration via BUSAL
- EtherCAT and PLCopen support for connectivity
- Improved efficiency due to time-optimal trajectory generation and multi-core optimization
- Dedicated support by our engineering team
