KPA EtherCAT Master stack ist ein umfassendes Produkt für industrielle Automatisierungsspezialisten, die ihre Anwendungen und Lösungen um Hochgeschwindigkeits-Kommunikationsfunktionen erweitern wollen. Es handelt sich um die zweite Generation des EtherCAT-Masters stack von koenig-pa, der eine neue, fortschrittliche Architektur und mehrere einzigartige Funktionen implementiert, die eine bessere Integration und Leistungssteigerung ermöglichen. Außerdem unterstützt er eine Vielzahl von Betriebssystemen.
KPA EtherCAT Master ist ein Software-Stack, der allen Standards der EtherCAT Technology Group entspricht und über zahlreiche Features verfügt, die zur Entwicklung kostenoptimierter und leistungsfähiger SPS auf nahezu jeder Plattform (z. B. Arm/Arm64 oder x86/x64) zur Ansteuerung von EtherCAT-I/O beliebiger Hersteller genutzt werden können.
EtherCAT
Wartung von EtherCAT-Netzwerken
Der KPA EtherCAT Master stack ist mit einer umfassenden Reihe von Funktionen ausgestattet, die die Wartung Ihres EtherCAT-Netzwerks verbessern. Er verfügt über eine Bus-Autorecovery-Funktion, die die Busfunktionalität im Falle von Unterbrechungen automatisch wiederherstellt und einen kontinuierlichen Betrieb ohne manuelle Eingriffe gewährleistet. Die automatische Slave-Statuskontrolle vereinfacht die Verwaltung der Slave-Gerätezustände, ermöglicht eine mühelose Kontrolle und reduziert die Komplexität des Netzwerkmanagements. Darüber hinaus erleichtert KPA EtherCAT Master stack die einfache Identifizierung und Verwaltung von Slave-Geräten innerhalb des Netzwerks und verbessert so die Gesamteffizienz. Seine robusten Fehlererkennungsfunktionen identifizieren und beheben proaktiv potenzielle Probleme und erhöhen die Zuverlässigkeit des Netzwerks.
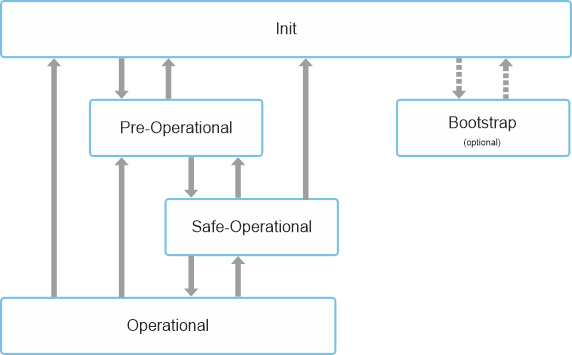
Darüber hinaus führt der Master automatisch die Steuerung der Zustandsmaschine aus und erfordert keine Eingaben von Benutzeranwendungen, was den Entwicklungsprozess erheblich vereinfacht.
Prozess Datenaustausch
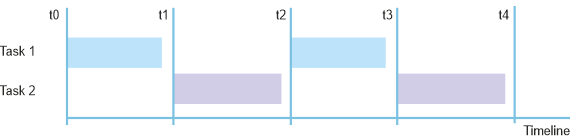
KPA EtherCAT Master stack unterstützt nicht nur Simple Tasks, sondern ermöglicht auch die Verwendung von mehreren EtherCAT Cyclic Tasks (ECT). Mit KPA EtherCAT Studio können Anwender auf einfache Weise ECTs erzeugen, die entweder vom Master oder einer externen Anwendung gesteuert werden können. Jede ECT ist mit spezifischen Prozessdaten verknüpft und arbeitet in einem bestimmten Ausführungszyklus. Durch die Verwendung von ECTs können Anwender Tasks in unterschiedlichen Zyklen und Zeiten ausführen, was eine effektive Steuerung der Buslast ermöglicht, indem den ECTs Operationen mit unterschiedlichen Ausführungsfrequenzen zugewiesen werden.
Darüber hinaus bietet das System automatische Aktualisierungen von E/A, so dass die Benutzer direkt mit E/A-Daten arbeiten können, ohne sich um die Erstellung von Frames kümmern zu müssen.
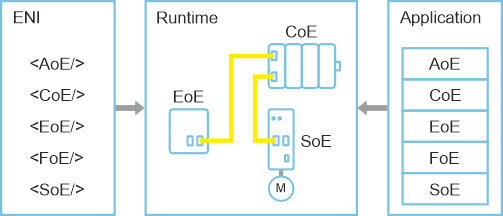
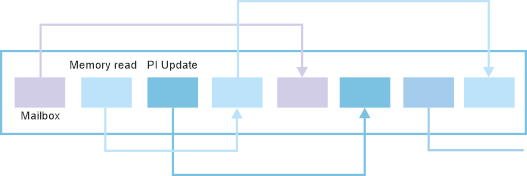
Mailbox
KPA EtherCAT Master stack bietet umfassende Unterstützung für alle Mailbox-Protokolle und Mailbox-Initialisierungsbefehle und stellt eine robuste Schnittstelle für die Initiierung von Mailbox-Austauschen bereit. Mit dieser Funktion können Benutzer Mailbox-Aktionen effektiv steuern und eine nahtlose Kommunikation und Interaktion innerhalb des EtherCAT-Netzwerks sicherstellen.
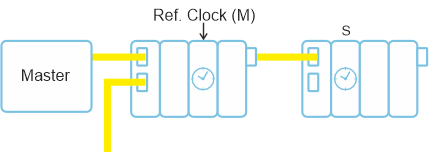
Distributed clocks
Die Distributed-Clocks-Funktion bietet einen robusten Synchronisationsmechanismus, der sicherstellt, dass der Master und alle Slave-Geräte auf dem Bus präzise koordiniert sind. Diese Funktion ermöglicht flexible Referenztaktkonfigurationen, bei denen der Master, ein Slave oder ein externes Referenztaktgerät als Zeitreferenz dienen kann, um eine genaue und zuverlässige Synchronisierung im gesamten EtherCAT-Netzwerk zu gewährleisten.
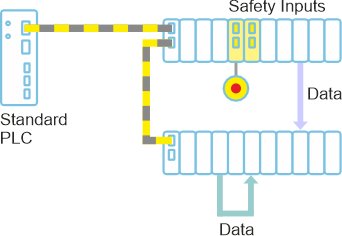
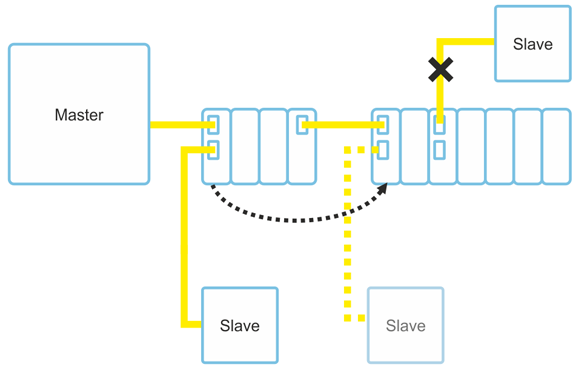
Fail Safe über EtherCAT mit Slave To Slave
Der KPA EtherCAT Master stack unterstützt die Slave-to-Slave-Kommunikation und ermöglicht die Interaktion zwischen Slaves ohne direkte physikalische Verdrahtung.
Diese Fähigkeit ermöglicht es dem Master, Fail Safe over EtherCAT (FSoE) zu unterstützen, um sicherzustellen, dass sicherheitskritische Anwendungen eine zuverlässige Kommunikation und Betriebsintegrität aufrechterhalten können. Durch die Nutzung dieser Funktion erhöht der KPA EtherCAT Master stack die Ausfallsicherheit des Systems und ist damit die ideale Wahl für Umgebungen, in denen Sicherheit und Zuverlässigkeit an erster Stelle stehen.
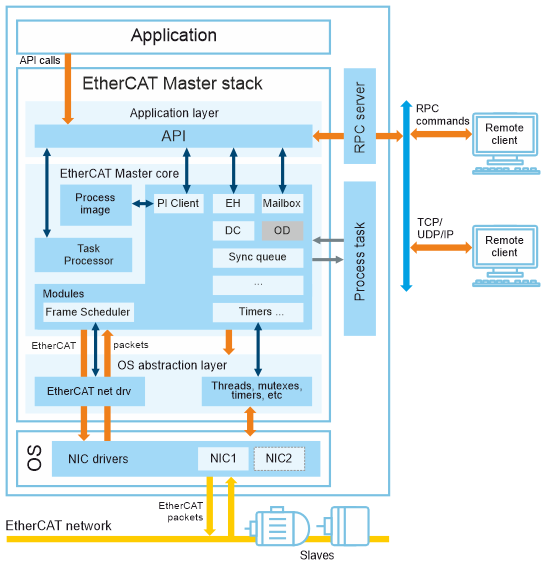
Kern
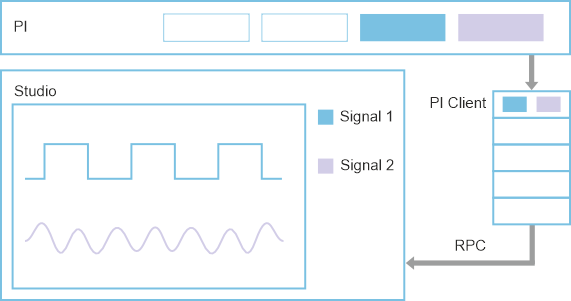
Process Image Client
Die Prozessabbildfunktionalität (PI) wird durch den PI-Client implementiert, der als Objekt dient, das Lese- und Schreibzugriff auf das PI bietet. Er erleichtert die Übertragung von Daten aus der PNK in den internen Puffer des Clients und ermöglicht die Anmeldung bei Ereignissen und Änderungen in der PNK. Der PI Client bringt mehrere Vorteile mit sich, darunter:
- Geschützter Zugriff auf PI
- Mehrere PI-Clients
- Mapping von PI-Variablen auf die Datenstruktur des Benutzers
- Atomare Operationen
- Mehrere Auslieferungspuffer
- Auslieferung durch Schreibzugriff oder durch Ereignis
- PI-Datenwarteschlange
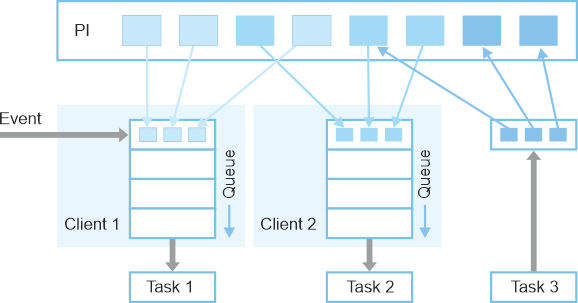
Ereignis-Handler
Der KPA EtherCAT Master stack verfügt über eine ereignisgesteuerte Architektur, bei der alle Prozesse auf der Grundlage bestimmter Ereignisse aktiviert und ausgeführt werden. Jedes Modul innerhalb des Masters ist mit verschiedenen Ereignissen ausgestattet, die sowohl vom Master selbst als auch von der Steuerungsanwendung genutzt werden können. Diese Ereignisse spielen eine entscheidende Rolle bei der Synchronisierung der Aufgabenausführung sowie bei der Benachrichtigung des Systems über zyklische Ereignisse, Statusaktualisierungen oder Notfallsituationen. Indem alle Master-Ereignisse auf der Ebene der Benutzeranwendung zugänglich gemacht werden, ermöglicht KPA EtherCAT Master stack die Implementierung eines ereignisgesteuerten Ausführungsmodus, der die Reaktionsfähigkeit und Effizienz des gesamten Systems verbessert.
Process Image monitoring
Der KPA EtherCAT Master stack verfügt über erweiterte Funktionen zur Überwachung des Prozessabbilds durch die Verwendung von PI Snapshot und PI Logger. Diese Funktionen ermöglichen die Echtzeitbeobachtung und -protokollierung des Prozessabbilds, so dass der Benutzer den Zustand des Systems zu jedem beliebigen Zeitpunkt erfassen und analysieren kann. Der PI Snapshot liefert einen Schnappschuss des aktuellen Prozessabbilds und ermöglicht so eine schnelle Beurteilung der Systemleistung, während der PI Logger kontinuierlich Änderungen im Zeitverlauf aufzeichnet und so wertvolle Erkenntnisse für die Fehlersuche und Optimierung liefert. Zusammen verbessern diese Tools die Fähigkeit, die Systemintegrität effektiv zu überwachen, zu analysieren und zu erhalten.

Asynchrone Kontrolle
Der KPA EtherCAT Master stack ist mit einer asynchronen Steuerung ausgestattet, die die parallele Ausführung sowohl der Operationen des Masters als auch der vom Benutzer initiierten Aufgaben erleichtert. Diese Funktion erhöht die Systemeffizienz, indem sie die gleichzeitige Ausführung mehrerer Operationen ermöglicht und bei Bedarf verschobene Aufgaben berücksichtigt. Darüber hinaus umfasst die asynchrone Steuerung eine Synchronisationswarteschlange, die sicherstellt, dass die Vorgänge in geordneter Weise ausgeführt werden, wodurch die Gesamtleistung und Reaktionsfähigkeit optimiert werden.
Single-Thread-Kontrolle
KPA EtherCAT Master stack verfügt über eine Single-Thread-Kontrolle, die sicherstellt, dass Operationen sequentiell in einem einzigen Ausführungsstrang ausgeführt werden. Dieses Design vereinfacht die Verwaltung von Aufgaben und bietet einen geradlinigen Ansatz für die Prozessabwicklung. Mit der Single-Thread-Kontrolle behält das System einen klaren und organisierten Ablauf der Operationen bei, wodurch die Komplexität, die mit der gleichzeitigen Verarbeitung verbunden ist, reduziert und die Zuverlässigkeit der Aufgabenausführung erhöht wird. Diese Funktion ist besonders vorteilhaft für Anwendungen, bei denen Ordnung und Vorhersagbarkeit für eine optimale Leistung unerlässlich sind.
OS-lose Lösung für eingebettete Systeme
KPA EtherCAT Master stack bietet eine betriebssystemlose Lösung, die auf eingebettete Systeme zugeschnitten ist und eine schlanke und effiziente Alternative zu herkömmlichen Betriebssystemen darstellt. Dieses Design minimiert den Overhead und den Ressourcenverbrauch und ermöglicht so schnellere Boot-Zeiten und eine verbesserte Leistung in ressourcenbeschränkten Umgebungen. Durch den Verzicht auf ein komplettes Betriebssystem ermöglicht der KPA EtherCAT Master stack den direkten Zugriff auf Hardware-Ressourcen, was zu einer verbesserten Reaktionsfähigkeit und Zuverlässigkeit führt. Diese Lösung ist ideal für Anwendungen, bei denen Effizienz und Echtzeitverarbeitung entscheidend sind, und gewährleistet eine nahtlose Integration und optimale Funktionalität in Embedded-Anwendungen.
Erweiterungen
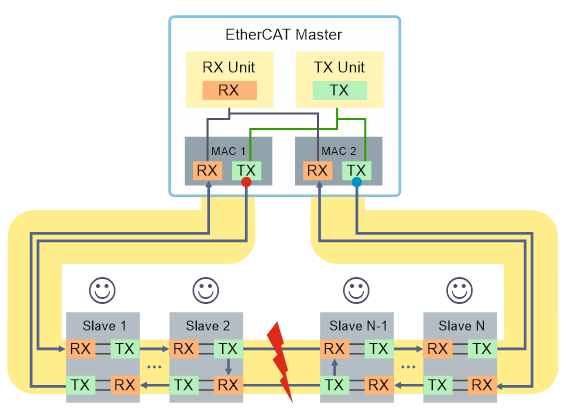
Kabel-Redundanz
Der Betrieb im Kabel-Redundanz gewährleistet eine kontinuierliche Kommunikation selbst bei einem Kabelbruch oder einem Knotenausfall. Erreicht wird dies durch eine Ringtopologie, die eine Datenübertragung in beide Richtungen ermöglicht und so eine robuste und zuverlässige Netzwerkstruktur bietet. Für die Implementierung der Kabelredundanzfunktion ist lediglich ein zusätzlicher Ethernet-Adapter auf dem Zielsystem erforderlich. Damit ist dies eine unkomplizierte Lösung zur Verbesserung der Systemausfallsicherheit und zur Aufrechterhaltung des unterbrechungsfreien Betriebs in kritischen Anwendungen.
Hot Connect
Die Hot-Connect-Funktion ermöglicht es dem Benutzer, flexibel Geräte zum Netzwerk hinzuzufügen oder zu entfernen, ohne die gesamte Systemfunktionalität zu unterbrechen. Mit dieser Funktion können Geräte sowohl vor dem Systemstart als auch während des Betriebs an den Datenverkehr angeschlossen oder davon getrennt werden, was dynamische Netzwerkanpassungen erleichtert. Diese Funktion unterstützt eine „flexible Topologie“, die die nahtlose Integration und den Betrieb zusätzlicher Geräte in Echtzeit gewährleistet und die Vielseitigkeit und Anpassungsfähigkeit des Systems erhöht.
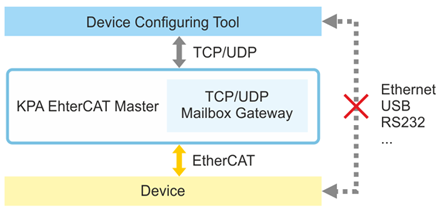
Mailbox Gateway
Die TCP/UDP-Mailbox-Gateway-Funktion ermöglicht es Anwendern, zusätzliche Geräte mit dem Tool des Herstellers direkt über den KPA EtherCAT Master stack zu konfigurieren. Diese Funktionalität macht zusätzliche Ethernet-Verbindungen oder andere Verbindungstypen überflüssig, was den Konfigurationsprozess rationalisiert und den Komfort für die Benutzer erhöht.
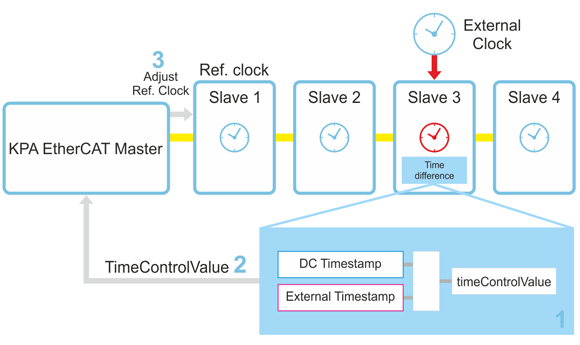
Externe Synchronisation
In einem EtherCAT-System wird das Distributed-Clocks-Konzept (DC) zur Synchronisation der lokalen Uhren in den EtherCAT-Komponenten verwendet. Weitere Informationen sind in der separaten Dokumentation zu finden. Da die Messung eines Signals zu einem bestimmten Zeitpunkt auf der Grundlage eines anderen Signals zum gleichen Zeitpunkt ausgewertet werden kann, benötigen diese Erfassungen eine Art von Synchronisationsschema.
Neben der lokalen Synchronisation mehrerer Produktionslinien mit der gleichen Quelle kann auch eine Synchronisation innerhalb der Grenzen einer Produktionslinie realisiert werden.
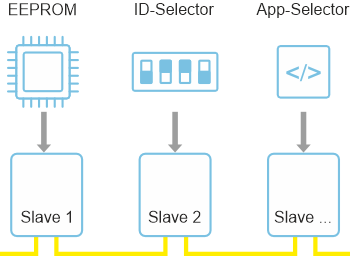
Explizite Geräte-Identifikation
Die Funktion Geräteidentifikation bietet eine eindeutige Kennung für jeden Slave, die eine präzise und zuverlässige Adressierung ermöglicht. Diese Funktion stellt sicher, dass jedes Gerät genau erkannt wird und mit ihm kommuniziert werden kann, was einen effizienten und fehlerfreien Datenaustausch ermöglicht.
Die EtherCAT-Technologie ermöglicht die Adressierung von Slaves auf unterschiedliche Weise, je nach den Möglichkeiten des Geräts und den Anforderungen des Benutzers.
- Konfigurierter Stationsalias, der vom Konfigurationstool festgelegt wird
- EEPROM-Alias – ein Alias wird aus dem EEPROM des Slaves gelesen (Adresse 0x8)
- Abfrage der ID – AL Status Code Register 0x0134 wird für den Wert der Geräte-ID verwendet
- Direkte ID – Der ID-Selector wird direkt an die I/O-Eingänge des ESC angeschlossen. Es ist kein Mikrocontroller erforderlich
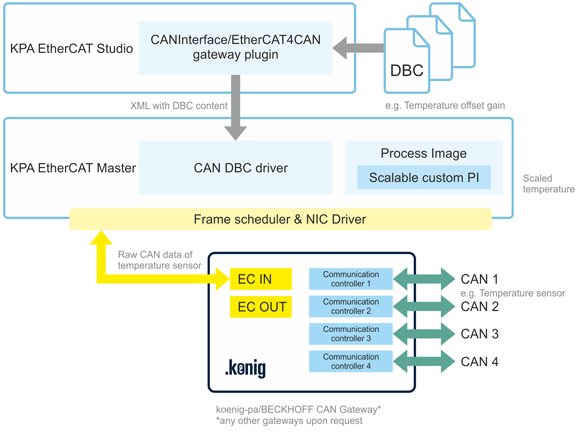
CAN-DBC-Treiber
Der CAN DBC- Treiber konvertiert Informationen in eine auf DBC- Ebene spezifizierte Ansicht, was dem Benutzer erlaubt, sie anzuwenden. Er ist für den Betrieb mit CAN-Gateways von BECKHOFF EL6751 (CAN DBC- Treiber) oder KPA EtherCAT4CAN Gateway (4CAN DBC- Treiber) bestimmt.
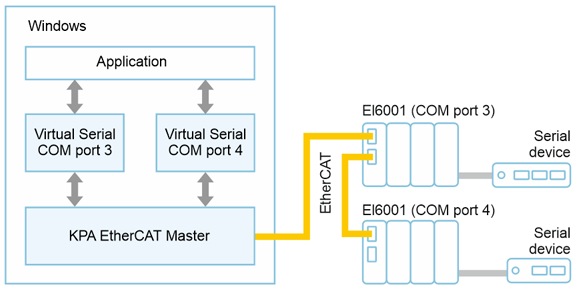
COM-Port-Emulator
KPA bietet eine einfache Möglichkeit des Datenaustauschs mit Geräten mit serieller Schnittstelle (RS232/RS422/RS485), wenn kein serieller COM-Port am Ziel-PC vorhanden ist. Zum Beispiel zur Kommunikation mit einem QR-Scanner oder verschiedenen Sensoren zur Messung von Druck/Temperatur/Luftfeuchtigkeit usw.
Das serielle Schnittstellenterminal wird als normale Windows-COM-Schnittstelle verwendet. In Verbindung mit dem KPA Virtual Serial COM-Treiber und dem KPA EtherCAT Master stack kann der Anwender mit einem seriellen Gerät aus seiner Windows-Anwendung über einen virtuellen COM-Port kommunizieren. Der Master überträgt die von der seriellen Schnittstellenklemme erhaltenen Daten an die Anwendung und zurück.
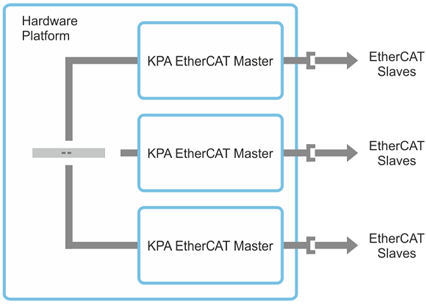
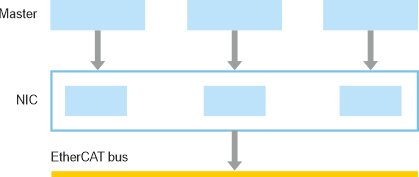
Multimaster
Die Multimaster-Funktionalität ermöglicht es dem Benutzer, mehrere EtherCAT-Busse von demselben Zielsystem gleichzeitig zu steuern. Die Master-API bietet die Möglichkeit, mehrere Master-Instanzen innerhalb eines Prozesses (oder mehrerer Prozesse) zu erstellen. Jede Master-Instanz hat ihr eigenes Handle, so dass Ressourcen wie Netzwerkschnittstellen und Zeitgeber konfliktfrei genutzt werden und es bei der Verwendung von API-Aufrufen nicht zu Verwechslungen kommt.
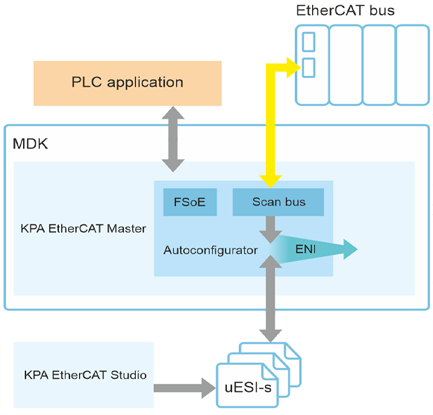
Autoconfigurator
Der KPA EtherCAT Master stack bietet die Möglichkeit, den Bus im laufenden Betrieb zu konfigurieren. Das Autokonfigurationsmodul ermöglicht es der Benutzeranwendung, die Slave-Konfiguration (uESI) auszuwählen, die angewendet werden soll. Dann erzeugt das Modul eine Master-Konfigurationsdatei (ENI) mit der angewandten uESI. Diese ENI wird dann bei der Arbeit des Masters verwendet. Die Autokonfigurator-Funktionalität kann verwendet werden, um zwischen verschiedenen Konfigurationen des Slaves umzuschalten, z. B. Lageregelung des Antriebs und Geschwindigkeitsregelung, oder um zwischen Buskonfigurationen mit unterschiedlicher Anzahl von Slaves zu wechseln. Die Autokonfigurator-Funktionalität kann auch in die OPC UA /WebSocket-Kommunikation integriert werden.
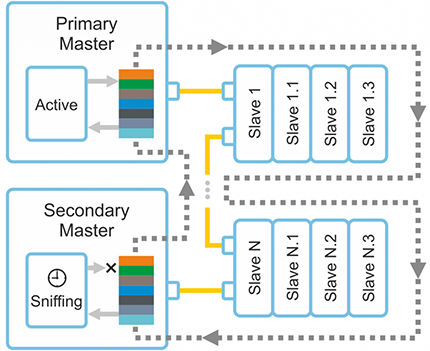
Master Redundancy
Mehrere Master können in einem Netzwerksegment koexistieren und bieten ein Backup für einen nahtlosen EtherCAT-Betrieb bei möglichen Master-Ausfällen. Dies erhöht die Zuverlässigkeit und Fehlertoleranz erheblich und reduziert gleichzeitig die Ausfallzeiten.
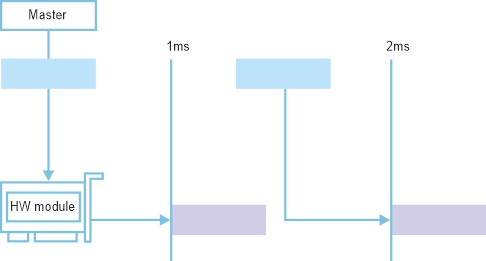
Hardware Timed Send
Die Funktion „Hardware Timed Send“ ermöglicht das Senden des zyklischen Frames genau zu Beginn des Master-Zyklus ohne Verzögerung. Die Funktion „Hardwaregesteuertes Senden“ kann nur aktiviert werden, wenn das Zielsystem über einen Hardware-Timer verfügt. Wenn das hardwaregesteuerte Senden aktiviert ist, bereitet der Master die Frames im Voraus vor, bevor er den Zyklus startet, und überträgt sie an ein Hardwaremodul (HW-Modul) auf dem Ziel. Wenn der Zyklus beginnt, sendet das HW-Modul daher die vorbereiteten Frames ohne Verzögerung.
Hardware send scheduler
The feature „Hardware send scheduler“ allows to reduce the Master load by sending background data on the side of FPGA implemented scheduler. Using this feature leads to the benefits:
- Erhöhung der Master-Performance durch Verringerung der EtherCAT-Frame-Vorbereitungszeit
- Ermöglicht eine kleinere Zykluszeit
- bis zu 100% Busauslastung
Diagnostik
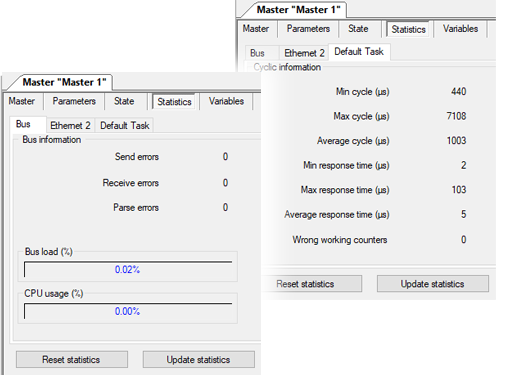
Statistische Zähler
KPA EtherCAT Master stack bietet statistische Zähler, die wertvolle Einblicke in die Leistung und den „Zustand“ des EtherCAT-Systems bieten.
Diese statistischen Zähler umfassen Metriken wie Buslast, CPU-Nutzung, Master-Zykluszeit und andere, die für das Verständnis der betrieblichen Effizienz des Netzwerks wesentlich sind.
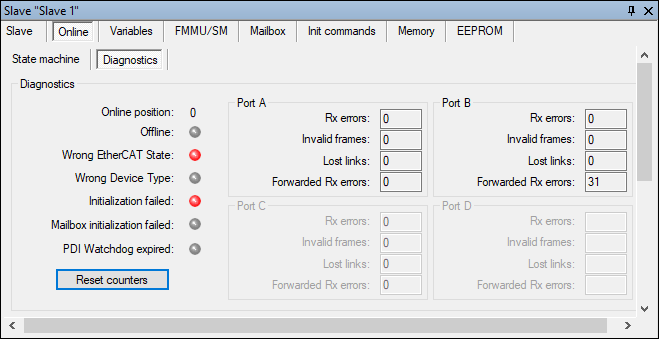
Ports-Diagnose
Der KPA EtherCAT Master stack bietet umfassende Diagnoseinformationen zu den Slave-Ports.
Diese Diagnosefunktion ermöglicht es dem Benutzer, den „Zustand“ und Status jedes angeschlossenen EtherCAT-Slaves in Echtzeit zu überwachen. Durch Einblicke in Parameter wie Kommunikationsstatus, Fehlerraten und Betriebsbedingungen ermöglicht der KPA EtherCAT Master stack Ingenieuren und Systembetreibern, potenzielle Probleme innerhalb des Netzwerks schnell zu identifizieren und zu beheben.
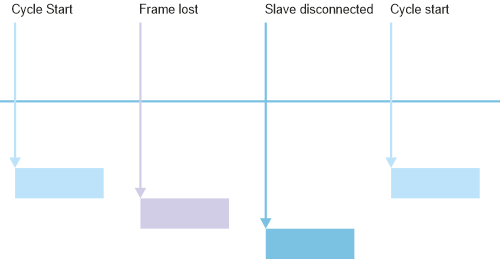
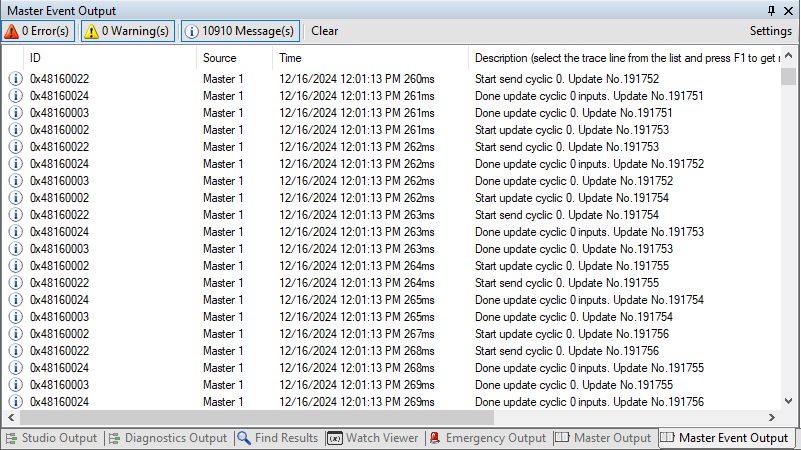
Master Traces, Ereignisbetrachter
KPA EtherCAT Master stack bietet Traces für Master-Operationen und Ereignisse.
Diese Tracing-Funktionalität ermöglicht es dem Benutzer, die Leistung des Masters in Echtzeit zu überwachen und zu analysieren, indem kritische Informationen über Kommunikationszyklen, Datenaustausch und Ereignisereignisse erfasst werden. Durch die Aufzeichnung dieser Vorgänge ermöglicht KPA EtherCAT Master stack Ingenieuren und Systemintegratoren, Einblicke in das Systemverhalten zu gewinnen, Probleme zu diagnostizieren und die Leistung zu optimieren.
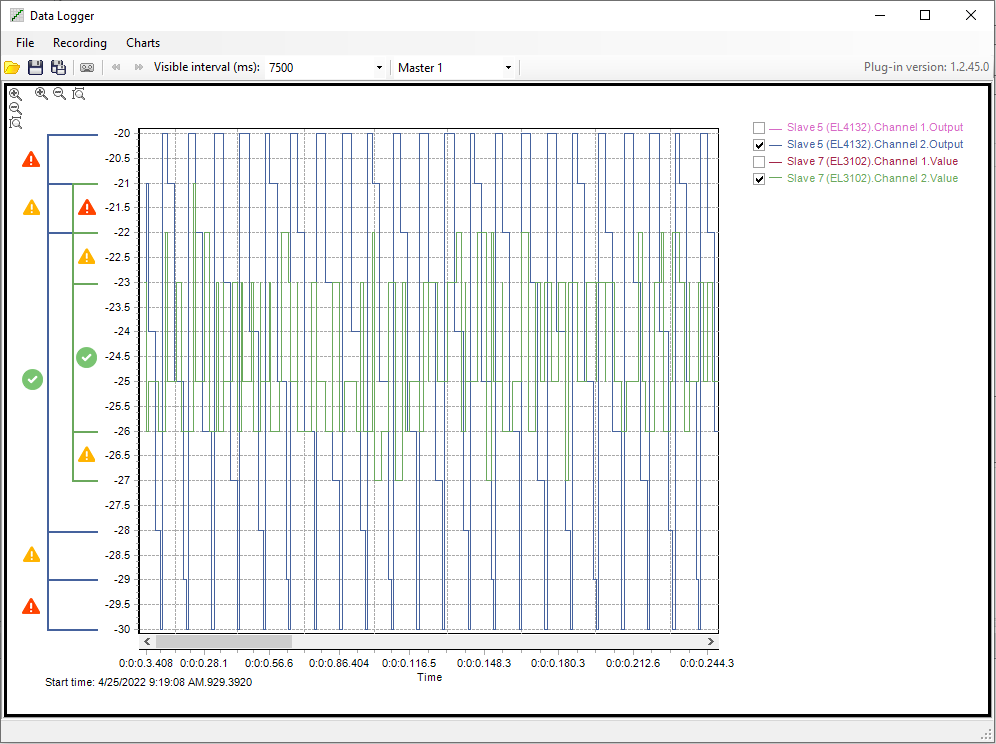
Data Logger
Mit dem Data Logger ist es möglich, allgemeine Informationen über EtherCAT-Pakete zu erhalten: z.B. welche Daten wann gesendet wurden, ob es verpasste (unverarbeitete) Frames gab, usw. Im Allgemeinen kann das Datenprotokollierungsverfahren als Wireshark-Trace im KPA-spezifischen Format dargestellt werden.
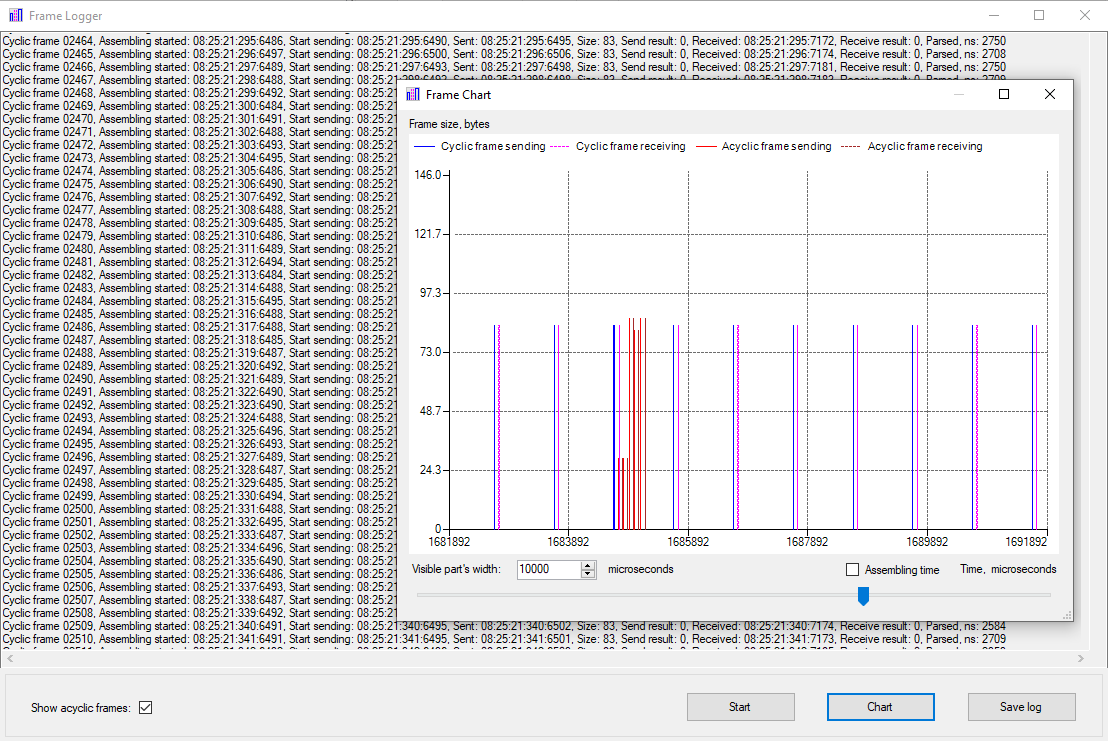
Frame Logger
Mit dem Frame Logger ist es möglich, Zeitinformationen zu EtherCAT-Paketen zu erhalten: Dauer der Paketzusammenstellung, Zeitpunkt des Parsens des empfangenen Frames, Zeitpunkt des Einsetzens des Frames in die Warteschlange zum Senden, usw.
OS / CPU
- Windows
- INtime
- RTX64
- Linux
- Xenomai
- QNX
- VxWorks
- FreeRTOS
- ITRON

- 32/64bit
- Intel
- Arm
- Zynq
- Sitara
