KPA EtherCAT Master is a comprehensive product for industrial automation specialists who intend to add high-speed communication capabilities to their applications and solutions. It is a second generation of EtherCAT Master stack by koenig-pa, implementing a new advanced architecture and several unique features that facilitate better integration and performance increase. Also, it supports a various range of operating systems.
KPA EtherCAT Master is a software stack, which corresponds to all EtherCAT Technology Group standards and has numerous features, which can be used for developing of cost-optimized and powerful PLC on almost any platform (such as Arm/Arm64 or x86/x64) to control EtherCAT I/O produced by any vendor.
EtherCAT
EtherCAT Network Maintenance
KPA EtherCAT Master stack is equipped with a comprehensive suite of features designed to enhance the servicing of your EtherCAT network. It includes a bus autorecovery function that automatically restores bus functionality in case of disruptions, ensuring continuous operation without the need for manual intervention. The automatic slave state control simplifies the management of slave device states, allowing for effortless control and reducing the complexity of network management. Additionally, KPA EtherCAT Master stack facilitates easy identification and management of slave devices within the network, improving overall efficiency. Its robust error detection capabilities proactively identify and address potential issues, enhancing network reliability.
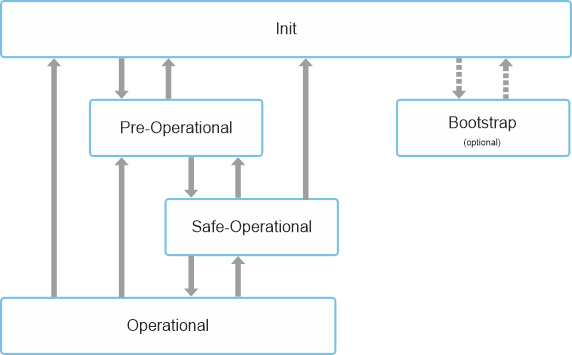
Furthermore, the Master automatically executes control of the State Machine, requiring no input from user applications, which significantly simplifies the development process.
Process Data exchange
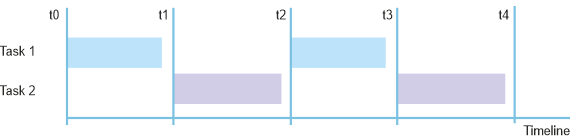
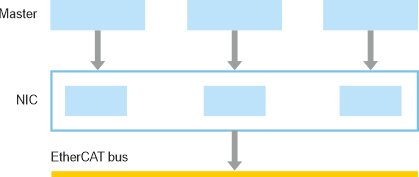
KPA EtherCAT Master stack not only supports Simple Tasks but also enables the use of multiple EtherCAT Cyclic Tasks (ECT). With KPA EtherCAT Studio, users can easily generate ECTs, which can be controlled either by the Master or an external application. Each ECT is linked to specific Process Data and operates on a designated execution cycle. By utilizing ECTs, users can execute tasks at varying cycles and times, allowing for effective control of bus load by assigning operations with different execution frequencies to the ECTs.
Additionally, the system features automatic updates of I/O, enabling users to work directly with I/O data without the need to worry about frame creation.
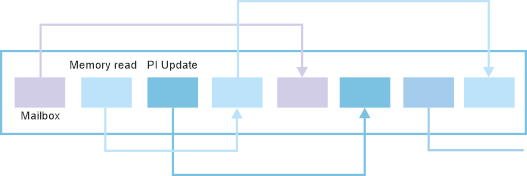
Mailbox
KPA EtherCAT Master stack offers comprehensive support for all Mailbox protocols and Mailbox Initialization commands, providing a robust interface for initiating Mailbox exchanges. This feature enables users to effectively control Mailbox actions, ensuring seamless communication and interaction within the EtherCAT network.
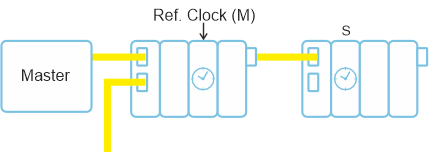
Distributed clocks
The Distributed Clocks feature provides a robust synchronization mechanism, ensuring that the Master and all Slave devices on the bus are precisely coordinated. This feature allows for flexible reference clock configurations, where the Master, a Slave, or an external reference clock device can serve as the timing reference, ensuring accurate and reliable synchronization across the entire EtherCAT network.
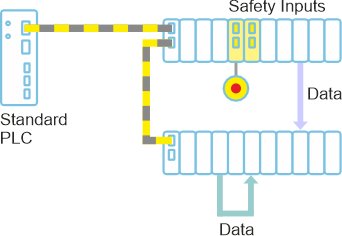
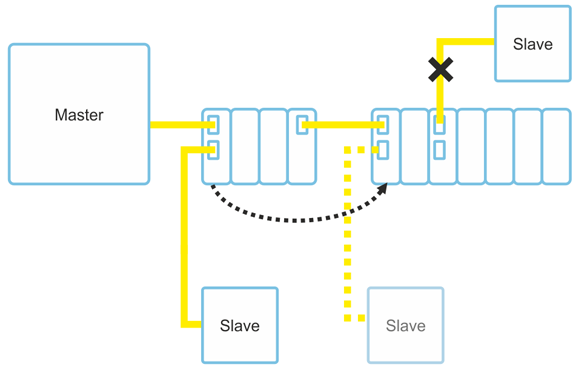
Fail Safe over EtherCAT with Slave To Slave
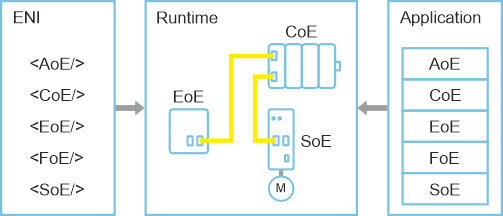
KPA EtherCAT Master stack supports Slave-to-Slave communication, enabling interaction between slaves without direct physical wiring.
This capability allows the Master to facilitate Fail Safe over EtherCAT (FSoE), ensuring that safety-critical applications can maintain reliable communication and operational integrity. By leveraging this feature, KPA EtherCAT Master stack enhances system resilience, making it an ideal choice for environments where safety and reliability are paramount.
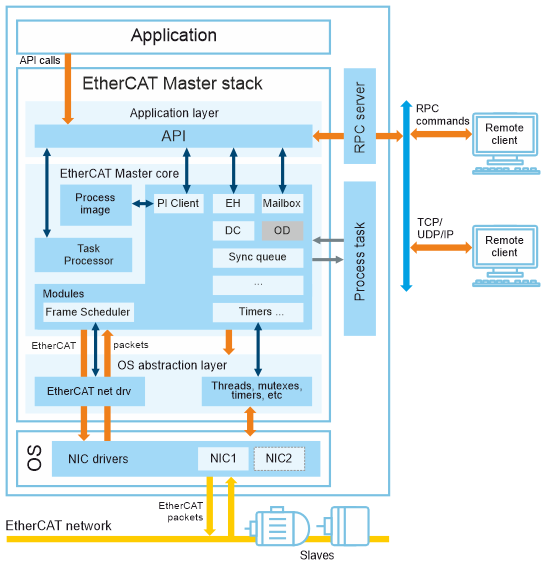
Core
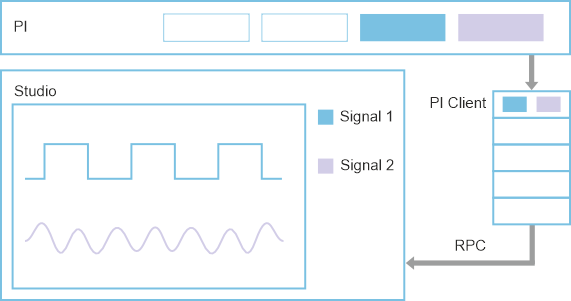
Process Image Client
The Process Image (PI) functionality is implemented through the PI Client, which serves as an object that provides read and write access to the PI. It facilitates the transfer of data from the PI to the internal client’s buffer and allows for subscription to events and changes in the PI. The PI Client brings several advantages, including:
- Protected access to PI
- Multiple PI clients
- Mapping of PI variables to the user’s data structure
- Atomic operations
- Multiple delivery buffers
- Delivery by write access or by event.
- PI data queue
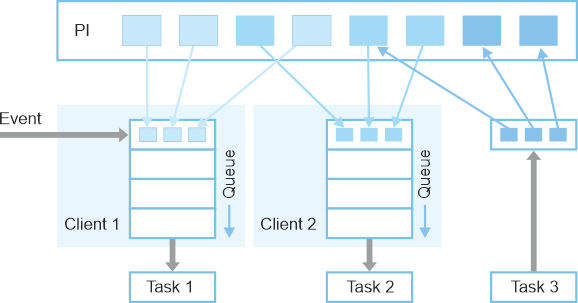
Event Handler
KPA EtherCAT Master stack features an event-driven architecture, where all processes are activated and executed based on specific events. Each module within the Master is equipped with various events that can be utilized by both the Master itself and the control application. These events play a crucial role in synchronizing task execution, as well as notifying the system about cyclic occurrences, status updates, or emergency situations. By making all Master events accessible at the user application level, KPA EtherCAT Master stack enables the implementation of an event-driven execution mode, enhancing the responsiveness and efficiency of the overall system.
Process Image monitoring
KPA EtherCAT Master stack incorporates advanced Process Image monitoring capabilities through the use of PI Snapshot and PI Logger. These features enable real-time observation and logging of the Process Image, allowing users to capture and analyze the state of the system at any given moment. The PI Snapshot provides a snapshot of the current Process Image, facilitating quick assessments of system performance, while the PI Logger continuously records changes over time, offering valuable insights for troubleshooting and optimization. Together, these tools enhance the ability to monitor, analyze, and maintain system integrity effectively.

Asynchronous control
KPA EtherCAT Master stack is equipped with asynchronous control, which facilitates the parallel execution of both the Master’s operations and user-initiated tasks. This feature enhances system efficiency by allowing multiple operations to run simultaneously, accommodating postponed tasks as needed. Additionally, the asynchronous control includes a synchronization queue, ensuring that operations are executed in an orderly manner, thereby optimizing overall performance and responsiveness.
Single thread control
KPA EtherCAT Master stack incorporates single-thread control, which ensures that operations are executed sequentially within a single thread of execution. This design simplifies the management of tasks, providing a straightforward approach to process handling. With single-thread control, the system maintains a clear and organized flow of operations, reducing the complexity associated with concurrent processing and enhancing reliability in task execution. This feature is particularly beneficial for applications where order and predictability are essential for optimal performance.
OS-less solution for embedded systems
KPA EtherCAT Master stack offers an OS-less solution tailored for embedded systems, providing a lightweight and efficient alternative to traditional operating systems. This design minimizes overhead and resource consumption, allowing for faster boot times and enhanced performance in resource-constrained environments. By eliminating the need for a full operating system, KPA EtherCAT Master stack enables direct access to hardware resources, resulting in improved responsiveness and reliability. This solution is ideal for applications where efficiency and real-time processing are critical, ensuring seamless integration and optimal functionality in embedded applications.
Extensions
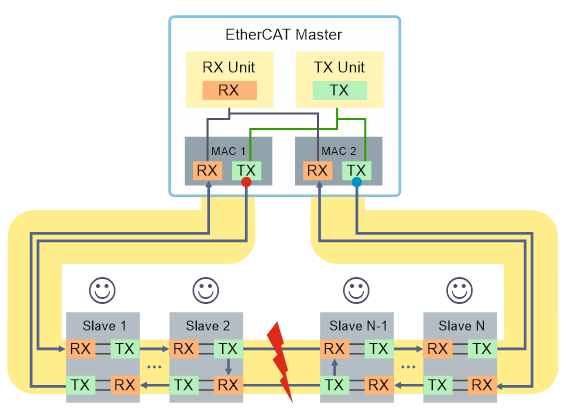
Cable Redundancy
Working in Cable Redundancy mode ensures continuous communication even in the event of a cable break or node failure. This is achieved through a ring topology that allows data to be transmitted in both directions, providing a robust and reliable network structure. To implement the Cable Redundancy feature, only an additional Ethernet adapter is needed on the target system, making it a straightforward solution for enhancing system resilience and maintaining uninterrupted operation in critical applications.
Hot Connect
The Hot Connect function enables users to flexibly add or remove devices from the network without disrupting overall system functionality. This capability allows for devices to be connected or disconnected from data traffic both before system startup and during operation, facilitating dynamic network adjustments. This feature supports a “flexible topology,” ensuring seamless integration and operation of additional devices in real-time, enhancing the versatility and adaptability of the system.
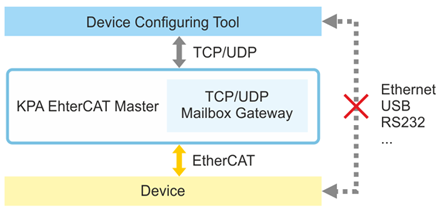
Mailbox Gateway
The TCP/UDP Mailbox Gateway feature enables users to configure additional devices using the vendor’s tool directly through KPA EtherCAT Master stack. This functionality eliminates the need for extra Ethernet connections or any other connection types, streamlining the configuration process and enhancing convenience for users.
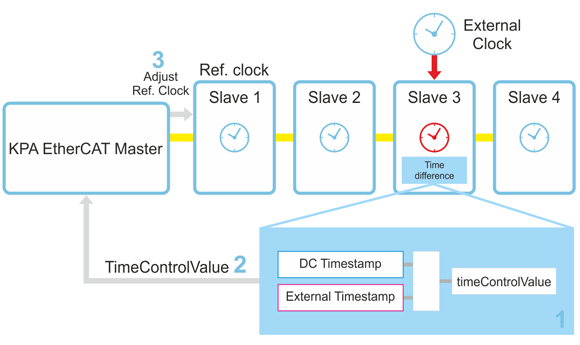
External Synchronization
In an EtherCAT system the distributed clocks concept (DC) is used for synchronization of local clocks in the EtherCAT components. Further information can be found in the separate documentation. Measurement of one signal at one point in time can be evaluated based on another signal at the same point in time, and thus, these acquisitions need some type of synchronization scheme.
Along with local synchronization of a few production lines with the same source can also be implemented in the boundaries of one production line.
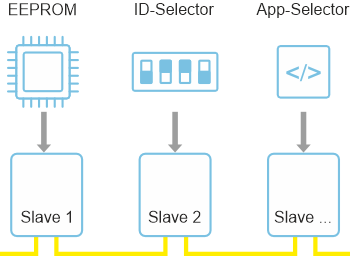
Explicit Device Identification
The Device Identification feature provides a unique identifier for each slave, allowing for precise and reliable addressing. This feature ensures that each device is accurately recognized and communicated with, enabling efficient and error-free data exchange.
EtherCAT technology allows slave addressing in different ways depending on device’s possibility and user’s needs.
- Configured station alias set by Configuration Tool
- EEPROM alias – an alias is read from slave’s EEPROM (0x8 address)
- Requesting ID – AL Status Code register 0x0134 is used for the Device ID value
- Direct ID – ID-Selector is connected directly to I/O Inputs of the ESC. There is no need for microcontroller
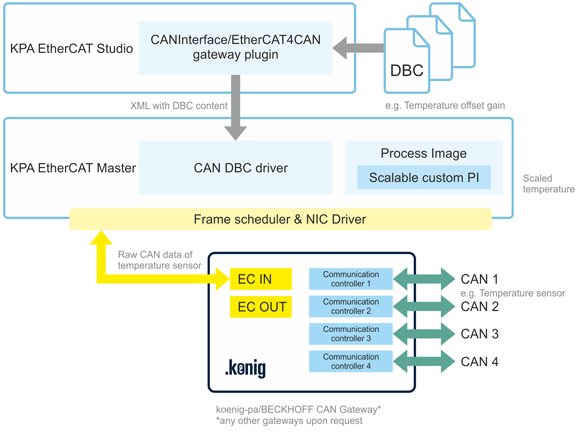
CAN DBC driver
CAN DBC driver converts information to a view specified at the DBC level, what allows user to apply them. It is intended for operating with CAN Gateways produced by BECKHOFF EL6751 (CAN DBC Driver) or KPA EtherCAT4CAN Gateway (4CAN DBC Driver).
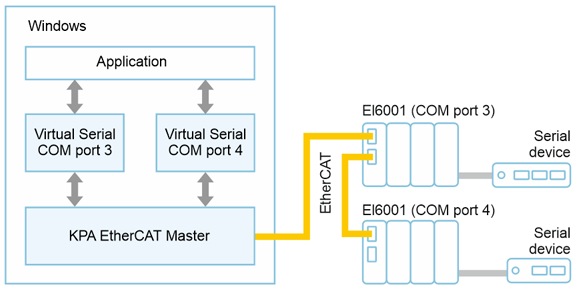
COM port emulator
KPA offers an easy way of data exchange with devices with serial interface (RS232/RS422/RS485) when there is no a Serial COM port on the target PC. For example, to communicate with a QR-scanner, or various sensors to measure pressure/ temperature / humidity and so on.
The serial interface terminal is used as a normal Windows COM interface. Using this in conjunction with KPA Virtual Serial COM driver and KPA EtherCAT Master stack allows a user to communicate with a serial device from their Windows application through a Virtual COM port. The Master transmits data got from the serial interface terminal to the application and back.
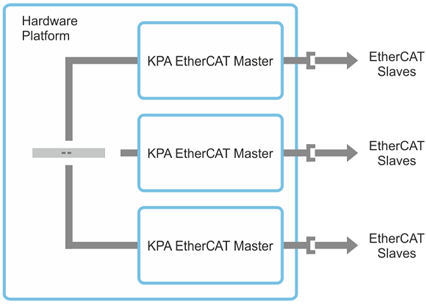
Multimaster
Multimaster functionality allows user to control several EtherCAT buses from the same target system simultaneously. Master API gives an opportunity to create several Master instances inside one process (or several processes). Each master instance has its own handle, so resources such as network interfaces and timers are used without conflicts and there is no confusion when using API calls.
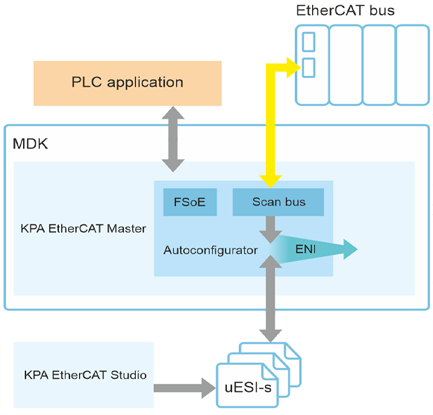
Autoconfigurator
KPA EtherCAT Master stack provides a possibility to configure the bus on the fly. The Autoconfigurator module allows the user application to select slave’s configuration (uESI) that will be applied. Then the module generates Master configuration file (ENI) with applied uESI. Further, this ENI will be used at Master work. The Autoconfigurator functionality may be used to switch between different configurations of the slave, e.g. position control of the drive and velocity control, or to switch between bus configurations with different number of slaves. Also, Autoconfigurator functionality can be integrated to the OPC UA /WebSocket communication.
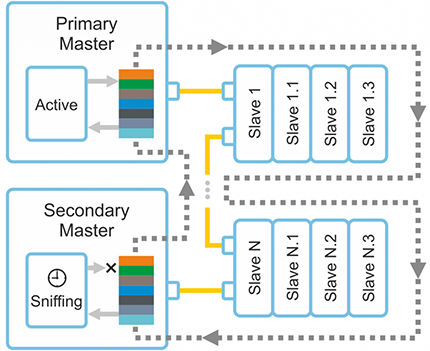
Master Redundancy
Several Masters can co-exist in a network segment, providing backup for seamless EtherCAT operation during possible Master failures. It significantly increases reliability and fault tolerance while reducing downtime.
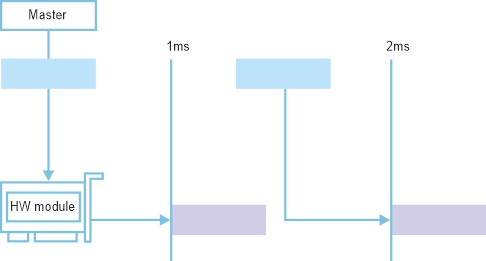
Hardware timed send
The feature “Hardware timed send” enables the cyclic frame to be sent exactly at the beginning of the Master cycle without any delays. The hardware timed send function can only be activated if the target system has a hardware timer. With hardware-controlled sending enabled, the Master prepares the frames in advance before starting the cycle and transfers them to a hardware module (HW module) on the target. Therefore, when the cycle starts, the HW module just sends the prepared frames without delay.
Hardware send scheduler
The feature “Hardware send scheduler” allows to reduce the Master load by sending background data on the side of FPGA implemented scheduler. Using this feature leads to the benefits:
- increase of Master performance by decreasing EtherCAT frame preparation time;
- allows to achieve smaller cycle period;
- up to 100% bus utilization.
Diagnostics
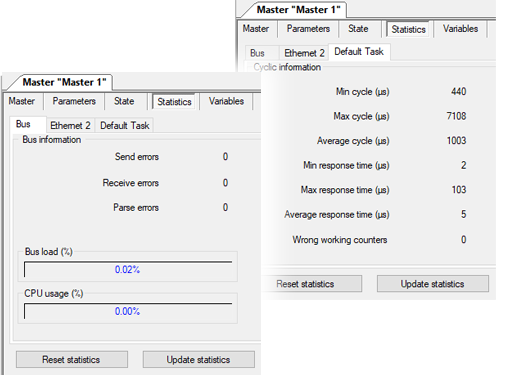
Statistic counters
KPA EtherCAT Master stack provides statistical counters that offer valuable insights into the performance and “health” of the EtherCAT system.
These statistical counters include metrics such as bus load, CPU usage, Master cycle time and others, which are essential for understanding the operational efficiency of the network.
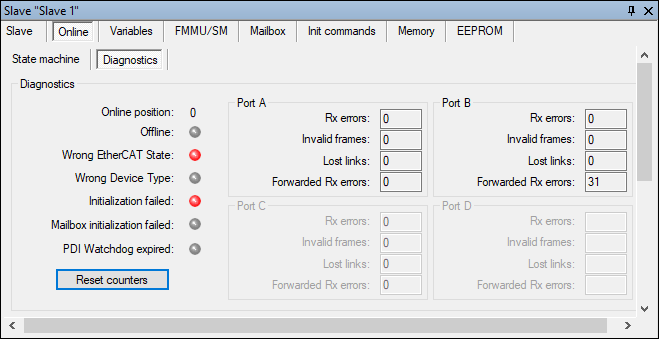
Ports diagnostics
KPA EtherCAT Master stack provides a comprehensive diagnostic information on slave ports.
This diagnostic capability allows users to monitor the ‘health’ and status of each connected EtherCAT slave in real-time. By offering insights into parameters such as communication status, error rates, and operational conditions, KPA EtherCAT Master stack enables engineers and system operators to quickly identify and troubleshoot potential issues within the network.
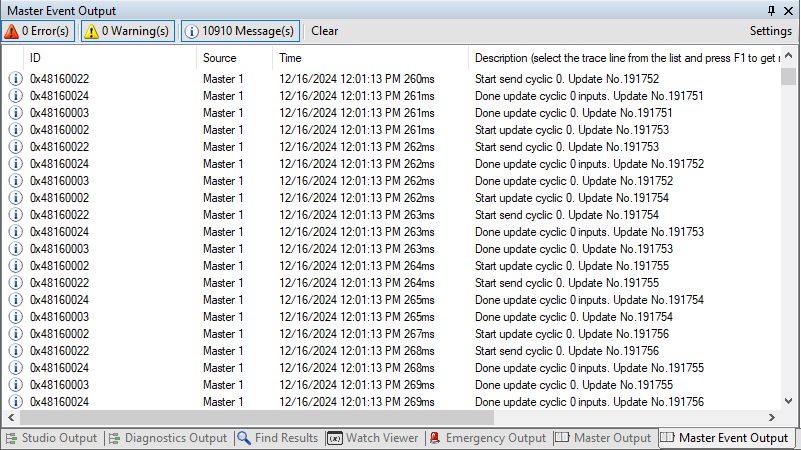
Master Traces, Events Viewer
KPA EtherCAT Master stack provides traces for Master operations and events.
This tracing functionality allows users to monitor and analyze the performance of the Master in real-time, capturing critical information about communication cycles, data exchanges, and event occurrences. By logging these operations, KPA EtherCAT Master stack enables engineers and system integrators to gain insights into the system’s behavior, diagnose issues, and optimize performance.
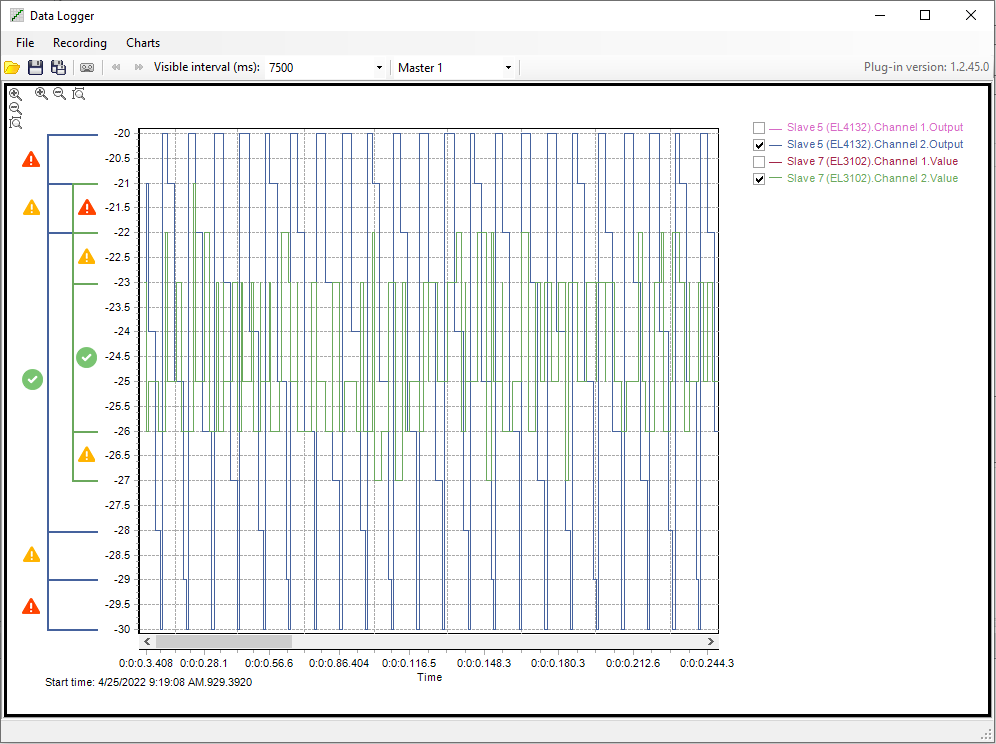
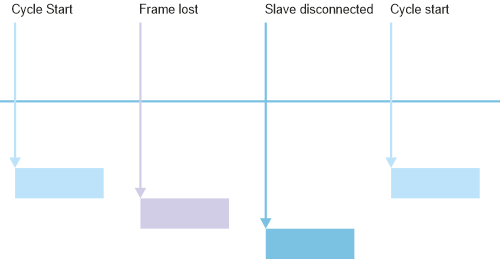
Data Logger
With the Data Logger it is possible to get general information on EtherCAT packets: e.g. what data were sent, when, whether there were missed (unprocessed) frames, etc. Generally, data logging procedure may be represented as getting Wireshark trace in KPA-specific format.
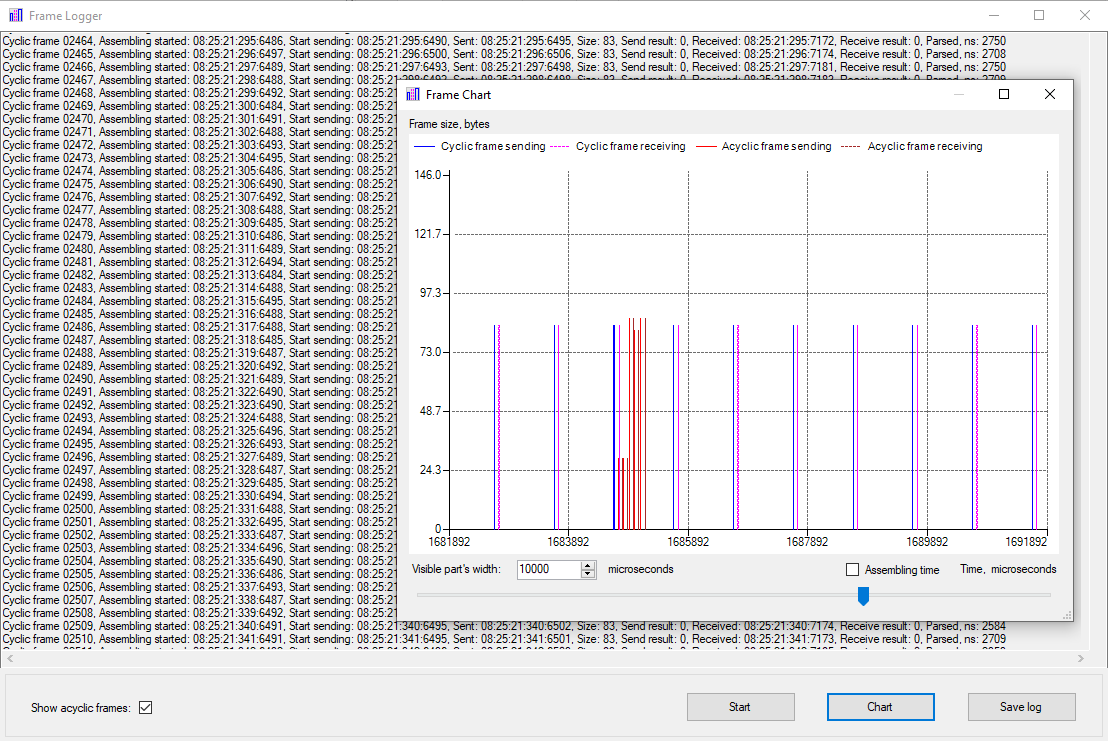
Frame Logger
With the Frame Logger it is possible to get time information on EtherCAT packets: duration of packet assembling, time of received frame parsing, time of setting frame to queue for sending, etc.
OS / CPU
- Windows
- INtime
- RTX64
- Linux
- Xenomai
- QNX
- VxWorks
- FreeRTOS
- ITRON

- 32/64bit
- Intel
- Arm
- Zynq
- Sitara
