Mit der KPA Motion Control Library bieten wir einen umfassenden Satz von Bibliotheken und Werkzeugen für die Automatisierung von Präzisionsbewegungssteuerungen. Unsere KPA Motion Control Software ist konform mit der PLCopen-Spezifikation und bietet eine herstellerneutrale Motion Control-Schnittstelle, die in verschiedenen Systemen implementiert werden kann.
Zu den wichtigsten Anwendungen der KPA Motion Control Library gehören:
- Automatisierung von Produktionslinien und Fertigungsprozessen
- Erstellen von Positions-, Geschwindigkeits- und Drehmomentsteuerungssystemen
- Entwicklung von Bewegungssteuerungsfunktionen für CNC-Maschinen wie Drehbänke, Fräsmaschinen, Plasma-/Laser-/Wasserstrahlschneider und andere
- Integration der Bewegungssteuerung in Spezialmaschinen wie Spritzgießmaschinen (IMM), Drahtbiegemaschinen, Verpackungslinien, Drucker und andere Industriemaschinen
Hauptmerkmale
- 3D-Achsen-, synchronisierte Achsen- und Einzelachsenbewegungssteuerung zur Ausführung komplexer Trajektorien
- Online-Generierung zeitoptimaler Trajektorien für erhöhte Effizienz
- Begrenzte Ruckbewegungsprofile, um mechanischen Verschleiß, Vibrationen und Belastungseinwirkungen zu reduzieren
- Bus Abstraction Layer (BUSAL) für die Integration mit unterschiedlichster Hardware
- Multi-Core-CPU-Unterstützung für Intel- und ARM-Architekturen
- Einfache Integration in das EtherCAT-Netzwerk mit unserem umfassenden KPA EtherCAT Master Stack
- Schrittmotorsteuerung über Step/Dir-Schnittstelle
- Konform mit PLCopen-Standards als stimmberechtigtes Mitglied der PLCopen-Gruppe
- Erweiterte Funktionen durch zwei Betriebsmodi –
Cyclic Synchronous Torque (CST) Modus für zentrale Steuerung
Cyclic Synchronous Position (CSP) Modus für dezentrale Steuerung - Motion Blending für sanfte Übergänge ohne Zwischenstopps
- Zahlreiche PLCopen-Funktionsbausteine implementiert (Teile 1, 4), einschließlich Einzelachsen- und koordinierter Mehrachsensteuerung
- Erweiterte Übergangsmodi zwischen Bewegungssegmenten
- Müheloses softwarebasiertes Getriebe für die Kopplung von Slave-Achsen an Master-Achsen
- Kurvenscheibenprofil-Implementierung für eine vereinfachte Slave-Achsensteuerung
- G-Code-Interpretationsunterstützung zur erleichterten CNC-Maschinenprogrammierung
- DXF-Dateiimport zur direkten Erstellung von Bewegungsprogrammen aus CAD-Software
- Kontinuierliche Trajektorienaktualisierung für Echtzeitanpassungen
- Softwarebasierte Achsenbegrenzungskonfiguration für erhöhte Sicherheit
- Virtuelle Achsenunterstützung für Entwicklung und Tests ohne physische Hardware
- Riemenachsen mit Modulo-Positionierung
- Echtzeitüberwachung der Positionsabweichung
Workflow
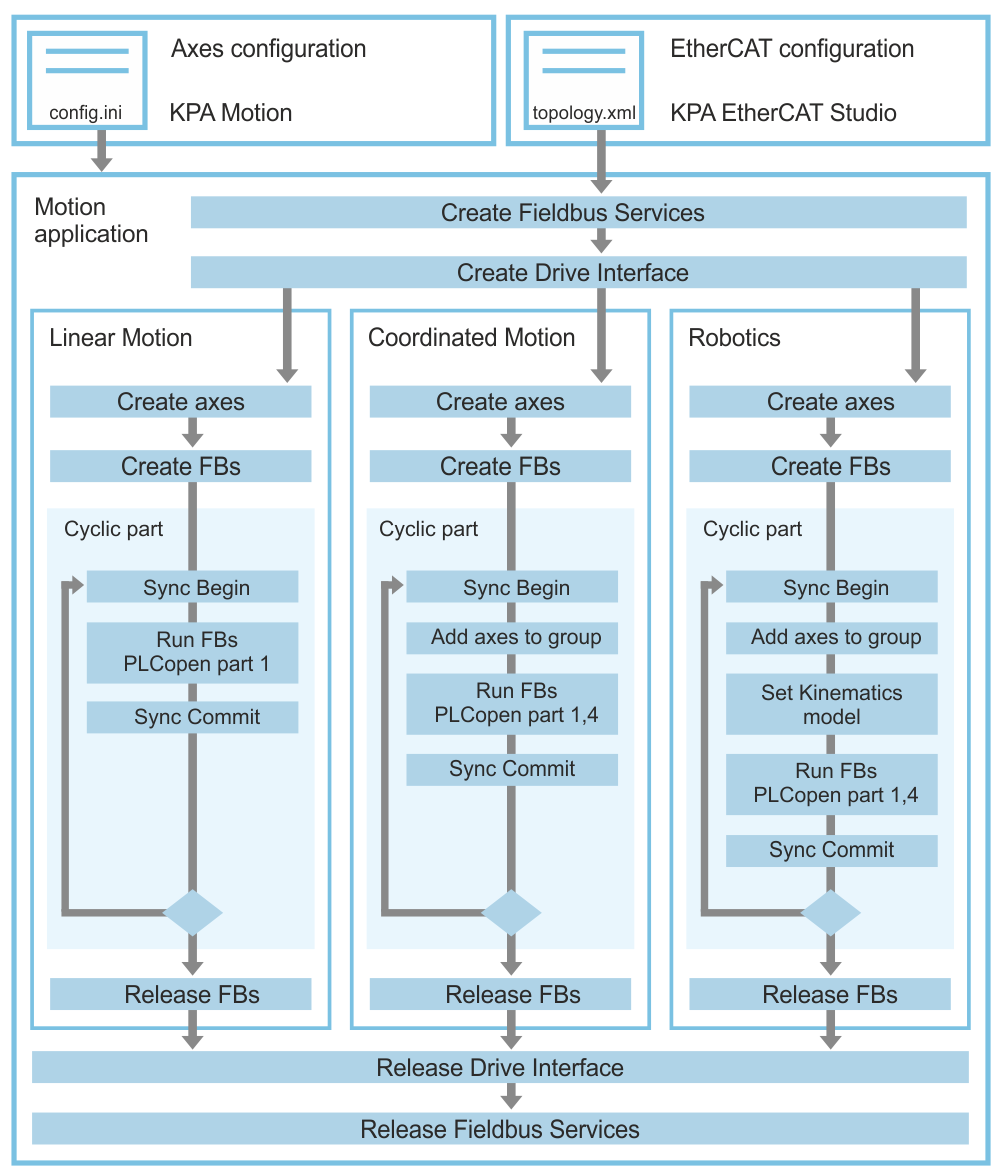
KPA Motion Control wird als Archiv geliefert, das Dokumentation, Header-Dateien, Bibliotheken und Beispiele enthält.
Vorteile
- Hardwareunabhängige Architektur
- Komplexe Bewegungsprofile
- Einfache Integration über BUSAL
- EtherCAT- und PLCopen-Unterstützung für Konnektivität
- Erhöhte Effizienz durch zeitoptimale Trajektoriengenerierung und Multi-Core-Optimierung
- Engagierter Support durch unser Engineering-Team
