15 Jul. 2019
A new version of the KPA EtherCAT Studio is released.
In comparison to the previous versions, KPA EtherCAT Studio provides a set of new features that makes the work with it advanced and user-oriented. There are a few new main features:
- Customizable ESI (uESI) collections
- Oscilloscope. Signals variation observing in run-time mode
- Сreating of custom master or slave variables
- Common setting configuring for mailbox protocols
- The shortest time of creating a Process image
- An extended list of device types for which the M2M plug-in is available
- List of pre-defined Master’s PI variables
- List of parameters from Master in online mode
- Additional Master diagnostic messages and separated Statistics based on Master 2 API
- Easy to operate Tasks / Sync units Tab
- An easy way of data exchange with devices from Windows application due to KPA Virtual Serial COM
- Power supply monitoring due to E-bus power calculation
- Text search among the EtherCAT objects
- Docked windows depending on user preferences
- New automation interface (API) based on EtherCAT Specification
Some details of these features are described below.
uESI
KPA EtherCAT Studio gives an opportunity to create the descriptions of user’s slaves (uESI-s) based on ESI-s (EtherCAT Slave Information XML files) provided by vendors. The uESI feature allows the user to edit the slave’s description: rename the slave, change PDO-s configuration and other parameters, add uESI attributes, etc.
uESI attributes
It is possible to add attributes to the uESI-s collection, assign them to slaves and then use these attributes according to the user’s needs, for example:
- to build the collection tree,
- to find a uESI in the collection,
- to select a uESI while applying another ESI.
Oscilloscope
Run-Time Data Logger handles the process of viewing data from the Master. This tool allows observing signals variation in run-time mode. There is an opportunity to set the type of chart: Line, Multiple axes or F(x).
Custom master/slave variables
There is an opportunity in Studio to create a custom master or slave variables. All variables are displayed in the master’s/slave’s Variables tab.
There are several examples of these variables usage:
- For customer’s application needs.
- Master diagnostics. You may create a pre-defined Master variable (see Master documentation) and monitor changing its value to analyze behavior/state of the bus.
- For plug-in’s usage. Customer’s plug-in may store some data in these variables to be used for auxiliary calculation/processing.
To monitor the variable’s value changing you may use the Data Logger or RunTime Data Logger tools that allow viewing a chart of the changing.
Master Mailbox
Configuring the common setting for mailbox protocols supported by slaves to simplify their configuring. Master EoE tab allows the user to configure EoE settings for Master which will be applied to all EoE slaves on the bus automatically.
Process Image review
Creating of process image has been revised and optimized. It shorts the time of creating a Process image.
The procedures of Process Image (PI) update and work with Process Image have been optimized.
M2M plug-in for EL6695
The list of device types for which the M2M plug-in is available was extended. From now on the plug-in is also available for the EtherCAT bridge terminal EL6695.
Getting list of Master PI variables
KPA EtherCAT Studio allows getting a list of pre-defined Master’s PI variables. The PI Variables Tab has been added to Master’s tabs. It displays PI variables with their properties (Name, Type, PI offset) and current value. Also, there is a possibility to update this list by clicking the “Update list”. KPA EtherCAT Studio allows getting a list of parameters from Master in online mode and view them on the Parameters Tab.
Diagnostics and Statistics based on Master 2 API
Diagnostics functionality (diagnostic data from Master and slaves) in KPA EtherCAT Studio has been implemented based on Master 2 Event Handler.
Support of Master 2 Event Handler makes possible to get Master diagnostic messages via its API. The Master Event Output window has been added to output windows of KPA EtherCAT Studio and it shows Master diagnostic messages got via Event Handler API.
Updated Statistics Tab represents statistics separately (in different sub-tabs): from the bus, from main and redundant NICs that are used by Master (or only main NIC if redundant one is not used), for Default and user-created tasks.
Virtual Serial COM
KPA offers an easy way of data exchange with devices with serial interface (RS232/RS422/RS485). The KPA Virtual Serial COM driver has been added to the KPA MRT package. It allows the user to communicate with the device from their Windows application via Virtual COM port. Master transmits data got from the serial interface terminal / the Virtual COM device to the recipient.
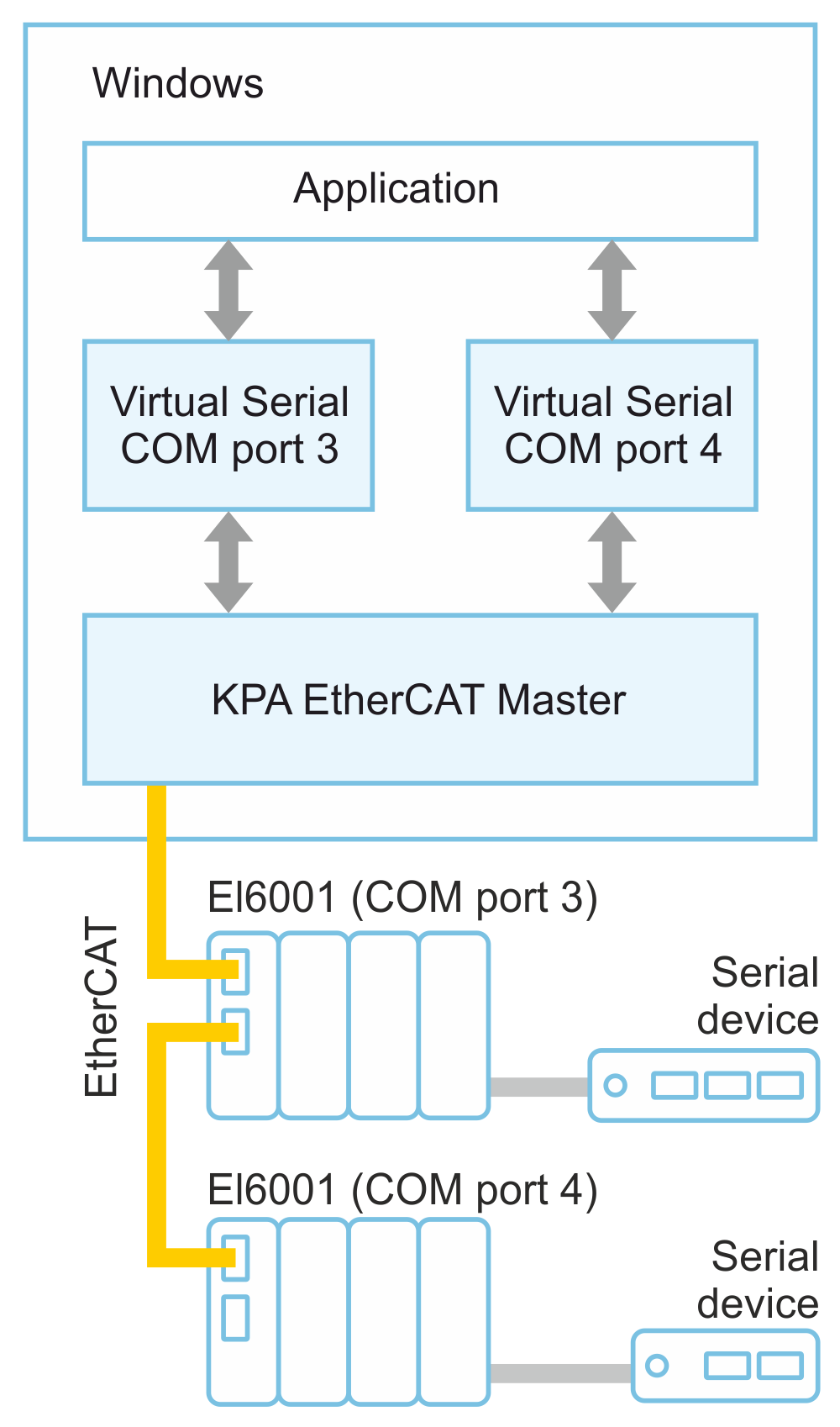
Example of Virtual Serial COM implementation
KPA Virtual COM driver is provided as a separate module and can be installed independently of Master. It is not required additional configuring with COM settings (baud rate, data bits, parity, etc.).
The EL600x/EL602x serial interface terminals enable the connection of the serial interface devices. To configure the terminal, KPA provides the Virtual Serial COM plug-in. It allows the user to enable serial interface usage, to specify required COM settings and assign the number of Virtual COM port that will be used for communication.
Tasks / Sync units Tab
In Studio 1.12 the tool Sample Rate Editor is used to configure PI data update. Starting from KPA EtherCAT Studio, the new architecture has been implemented and it is implied the using of Tasks and Sync units to configure PI data update. In comparison to the Sample Rate Editor tool, the new approach fully corresponds to the ETG2100 EtherCAT Network Information Specification. Using Tasks and Sync Units gives an opportunity to update particular blocks of Process Image at a certain time.
E-bus power calculation
One of the possible physical interfaces for EtherCAT slaves connection is Low Voltage Differential Signaling (LVDS, also called: E-Bus). The corresponding interface is used to establish communication between so-called “modules” devices typically available for almost all production lines of Beckhoff E-bus devices (EL1002, EL2004, etc.).
In general, the “coupler” devices (EK1100) is used as the current/power supply device and has limited powering capabilities defined in ESI file (according to ETG standards). As well as each connected module has limited current consumption. Therefore, the connection of huge amount of LVDS slaves (usually marked as ELxxxx devices by Beckhoff and defined in ESI file with physics “K”) onto EtherCAT coupler EK1100 (and similar devices) leads to lack of power possibilities of the certain coupler. Such case may lead to increasing of the number of wrong working counters (WKCs) per datagram and/or loosing of connections of part or even the whole segment (coupler EK1100 with connected ELxxxx slaves).
To handle and minimize these problems, the property E-bus power has been added in the Slave Tab. It displays the slave’s capability set in the ESI and allows the user to change this value in the project.
Global search
This feature provides a text search among the EtherCAT objects (e.g. slave name, PDO/PDO Entry name, Master/slave variables, etc.).
Dockable windows
In KPA EtherCAT Studio all parts of the main window (Configuration tree pane, Configuration window, Slaves Library pane, Outputs window, Watch Viewer window) are dockable – may be docked to one of the sides of the main window or used as separate windows.
New automation interface (API)
In KPA EtherCAT Studio a new extended API based on EtherCAT Specification has been implemented.
New KPA EtherCAT Studio is available through Customer Portal and by contacting our Sales: sales@koenig-pa.de