借助 KPA Motion Control Library,我们提供了一整套用于精密运动控制自动化的库和工具。我们的 KPA Motion Control 软件符合 PLCopen 规范,提供了一个与供应商无关的运动控制接口,可在各种系统中实施。
KPA Motion Control Library 的主要应用包括:
- 自动化生产线和制造流程
- 创建位置、速度和扭矩控制系统
- 为计算机数控(CNC)设备(如车床、铣床、等离子/激光/水刀切割机等)开发运动控制功能
- 将运动控制集成到专用设备中,如注塑机(IMM)、折弯机、包装生产线、打印机及其他工业设备
主要特性
- 3D 轴、同步轴和单轴运动控制,可执行复杂轨迹
- 在线生成时间最优轨迹,提高效率
- 限加加速度运动曲线,减少机械磨损、振动和负载冲击
- 总线抽象层(BUSAL),实现多种硬件集成
- 支持多核CPU,兼容 Intel 和 ARM 架构
- 可通过我们自主研发的 KPA EtherCAT Master 轻松集成到 EtherCAT 网络
- 通过步进/方向(step/dir)接口控制步进电机
- 符合PLCopen 标准,为 PLCopen 组织的投票成员
- 提供两种运行模式,增强功能:
Cyclic Synchronous Torque(CST)模式——集中控制
Cyclic Synchronous Position(CSP)模式——分散控制 - 运动平滑过渡(Motion Blending),实现无中间停顿的流畅运动
- 实现多个PLCopen 功能块(第 1、4 部分),涵盖单轴控制和协调多轴控制
- 支持高级运动段间过渡模式
- 支持软件化齿轮功能,轻松实现从属轴与主轴的同步
- 支持凸轮曲线功能,便于从属轴控制
- 支持 G 代码解析,便于 CNC 设备编程
- 支持 DXF 文件导入,可直接从 CAD 系列软件创建运动程序
- 支持连续轨迹更新,实现实时调整
- 支持软件设定轴行程限制,提高安全性
- 支持虚拟轴,无需物理硬件即可进行开发和测试
- 支持带状轴(Belt Axes)及模数定位
- 支持实时位置滞后监测
工作流程
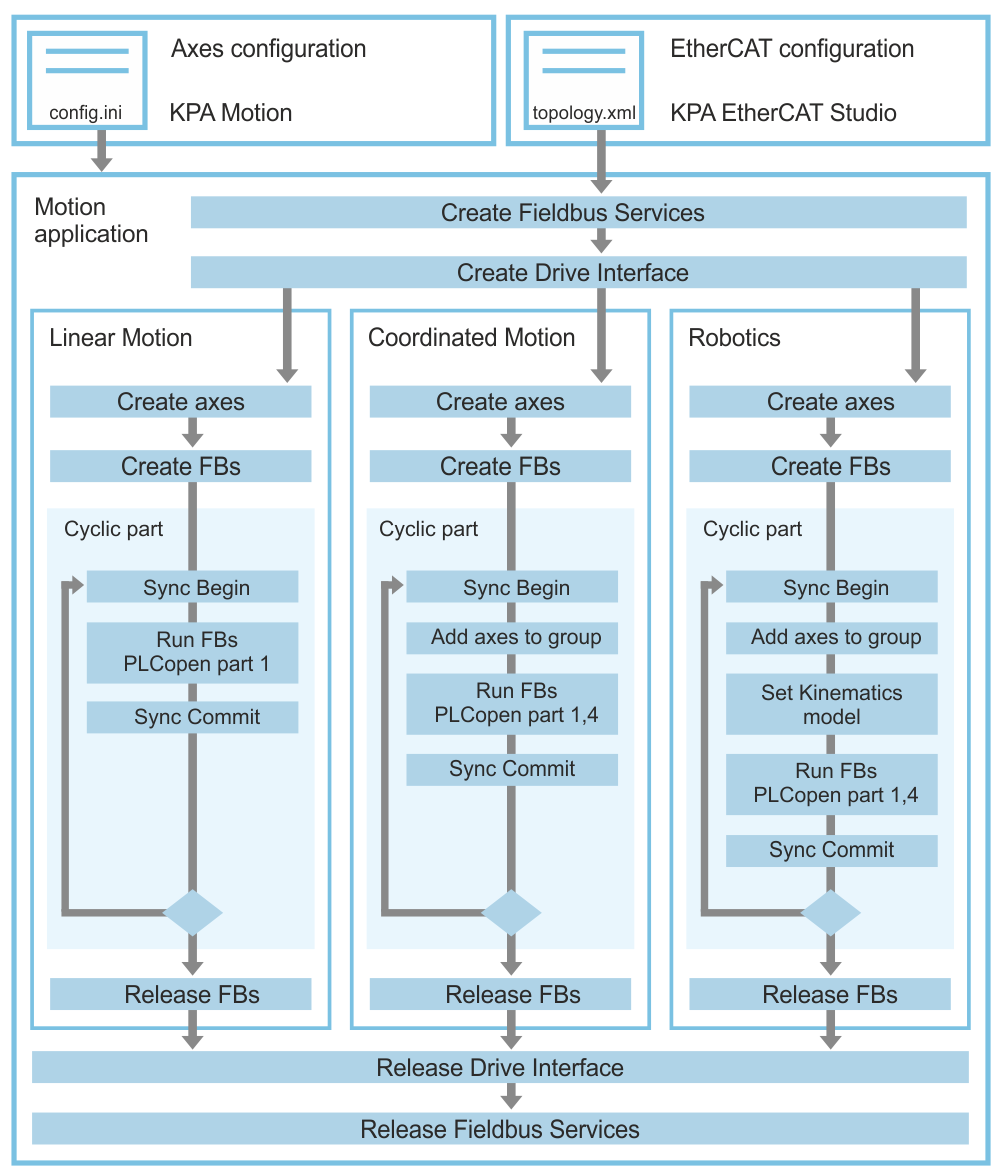
KPA Motion Control 以压缩包的形式提供,其中包含文档、头文件、库文件和示例。
优势
- 硬件无关的架构
- 复杂的运动轨迹
- 通过 BUSAL 实现简单集成
- 支持 EtherCAT 和 PLCopen 连接
- 基于时间最优轨迹生成和多核优化,提高效率
- 由我们的工程团队提供专门技术支持
